M. X - DYNAMIQUE - INTERACTION DE DEUX POINTS
Mobile relatif et masse réduite
Définitions
• L’interaction dans un système (isolé) de deux points matériels
et
peut être
décrite par :
et
.
Le principe des actions réciproques
correspond dans ce cas à la propriété :
. Le référentiel barycentrique est alors galiléen et il est
bien approprié pour simplifier les calculs.
◊ remarque : ceci peut se généraliser aux cas où interviennent des
forces extérieures, si celles-ci sont en première approximation
compensées par les forces d'inertie dans le référentiel
barycentrique (non galiléen dans ce cas).
• Dans le référentiel barycentrique :
donc les positions ne sont pas indépendantes et le problème
peut se simplifier.
Puisque la première propriété (
) a été déduite d’une combinaison des deux équations du
système, une seconde propriété (indépendante) peut être obtenue par
une autre combinaison. Il est logique de considérer une combinaison
décrivant
:
.
On appelle alors “masse réduite” la
quantité
et on peut nommer “mobile relatif” le point
tel
que
, auquel on attribue la masse
.
L’équation différentielle du mouvement relatif s’écrit ainsi
:
(en caractérisant par
les
quantités calculées dans le référentiel barycentrique).
◊ remarque : on pourrait aussi bien utiliser
et
.
Propriétés
• Le mobile relatif est représentatif de
l’énergie cinétique
totale
dans
le référentiel barycentrique :
et
;
et
;
ainsi :
.
• Le mobile relatif est représentatif du moment
cinétique
total
dans le référentiel barycentrique :
.
• Par contre, le mobile relatif est
représentatif du mouvement
relatif de
par
rapport à
, ou bien
du mouvement de
ou
par
rapport à
, mais non
du mouvement d’ensemble de
et
(donc de
) par
rapport à
:
(mouvements homothétiques),
mais :
dans le référentiel barycentrique (
).
Énergie potentielle
Énergie potentielle d’interaction
• L’interaction de deux points matériels
et
peut être
décrite par leurs actions réciproques :
.
Si la force
dérive d’une énergie potentielle
:
où
correspond à une dérivation par rapport aux coordonnées de
.
Mais pour des points matériels, l’énergie potentielle de
dans son
interaction avec
ne peut
dépendre que de la distance
, donc elle dépend aussi de
:
.
Ainsi :
donc cette énergie potentielle, qui décrit les travaux
des
deux forces réciproques, est donc l’énergie potentielle
d’interaction de
l’ensemble des deux points.
En outre :
, donc le principe des actions réciproques est vérifié :
.
Enfin, le mobile relatif est représentatif de
l’énergie potentielle d’interaction (par rapport à
), car
ne dépend
que de
, donc on peut écrire :
.
“Énergie potentielle radiale”
• Si les forces d’interaction dérivent d’une énergie
potentielle
avec
, alors l’énergie mécanique
(associée à
dans le
référentiel barycentrique) est constante.
Or le point
a une
accélération centrale, avec
constant : mouvement selon la “loi des aires” dans le plan
perpendiculaire à
.
Dans le plan du mouvement :
(avec
) et on peut obtenir une expression de
seul :
.
En définissant alors une “énergie potentielle radiale” :
(dont le second
terme décrit l’effet “centrifuge” associé aux rotations de
autour de
), on obtient
finalement :
.
◊ remarque : on obtient ainsi, de façon indirecte, l'expression dans
le référentiel tournant autour de
comme
et
(et
), par
rapport auquel il n'y a plus qu'un mouvement radial (la rotation
n'étant pas uniforme, le passage direct à ce référentiel est loin
d'être évident).
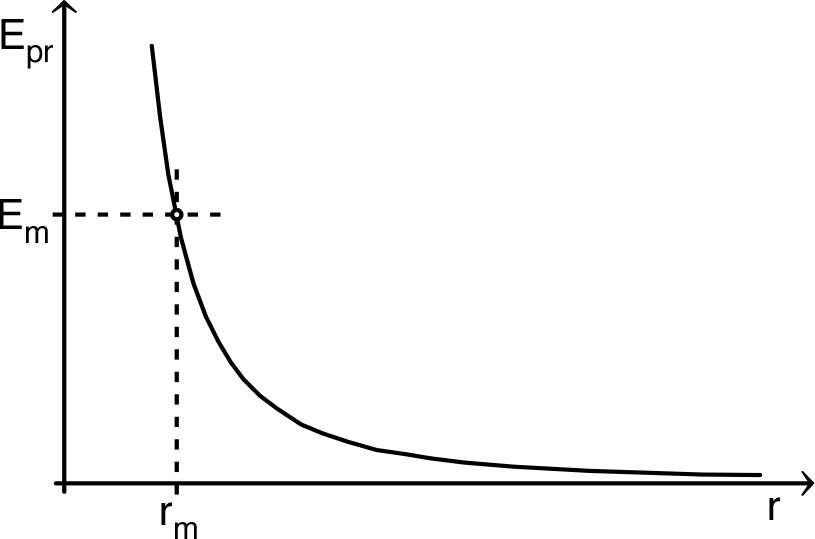
• Si
était
un point isolé (mouvement rectiligne uniforme) :
.
Il y aurait une distance minimale d’approche (de l'origine à
la trajectoire pour
) :
.
|
|
 |
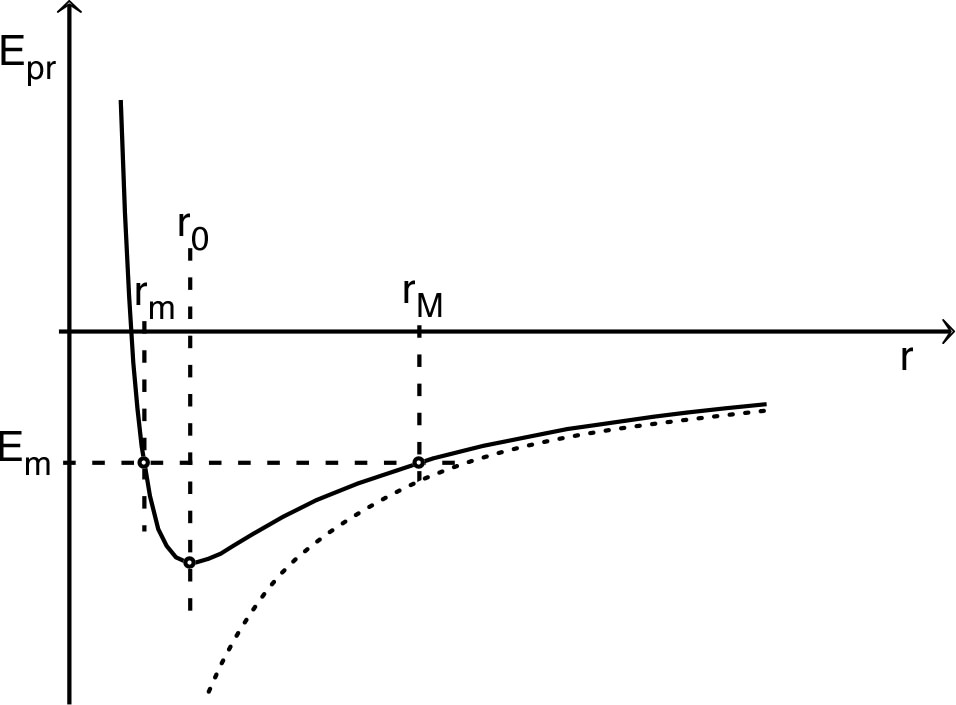
• Pour
soumis à une
force attractive en
et dont le moment cinétique est non nul, on obtient :
d’où on déduit l’existence de mouvements “confinés”
(pour
) avec une distance minimale
et une
distance maximale
:
◊ remarque : à grande distance le terme en
prédomine (pointillé) ; à courte distance l'effet “centrifuge”
s'y ajoute.
• Le cas particulier du mouvement circulaire de rayon
correspond à l'équilibre relatif, dans le référentiel
tournant, avec
.
◊ remarque : l'énergie mécanique donnant une expression pour
et le
moment cinétique en donnant une pour
, il
est toujours possible d'en déduire (au moins numériquement, car ces
intégrales sont rarement simples) :
- le mouvement radial sous la forme :
;
- la trajectoire sous la forme :
.
Mouvements des satellites
• On prend l’origine au centre d’inertie
pour étudier
le mouvement de
et
au moyen
d’un “mobile relatif”
et on
considère l’interaction :
.
Étudiés par rapport à
, les
mouvements ont donc la même forme que celle donnée par
l'approximation du corps attracteur très massif : il suffit de
remplacer
et
pour
obtenir le mouvement de
, puis les
mouvements de
et
s'en
déduisent par homothétie.
En particulier la troisième loi de Kepler s'écrit ici :
.
📖 exercice n° I.
Notions élémentaires sur les chocs
• Dans le cas général on ne connaît pas la loi de force
d’interaction, mais on peut la négliger à grande distance ; on peut
se limiter à relier les limites “longtemps avant” et “longtemps
après” le choc (en comparaison de sa durée).
En particulier, pour un système isolé, il y a
toujours conservation de la quantité de mouvement totale
:
(où les “primes” désignent ici les quantités après le choc, dans
le même référentiel).
La conservation de l’énergie totale peut aussi
être utilisée ; en particulier pour les chocs “
élastiques”
(où aucune partie du système ne change d’énergie “interne”) il y a
conservation de l'
énergie cinétique :
.
◊ remarque : les chocs inélastiques peuvent être étudiés “plus
facilement” en mécanique relativiste, dans la mesure où les
modifications “internes” des particules peuvent être décrites par
des énergies potentielles d'interaction incluses dans les énergies
de masse au repos (la variation des énergies de masse donne la
variation des énergies cinétiques).
• Ces deux lois ne permettent pas de déterminer complètement le
mouvement limite après le choc (il dépend du moment cinétique total
et de la loi de force d’interaction) ; en particulier elles ne
donnent pas la répartition angulaire de .