M. III - DYNAMIQUE ; ÉNERGIE MÉCANIQUE
Théorème de l’énergie cinétique
• Soit un point
soumis à une force
, on définit le travail de cette
force lors d’un déplacement
par : .
Le travail de la force
pour un déplacement de
à
est par
conséquent :
(dans le cas général, l’intégrale dépend du trajet suivi).
La puissance fournie au point
par la
force
est par ailleurs :
.
• D’après le principe fondamental :
et .
La variation de l’énergie cinétique est donc
égale à la somme des travaux des forces exercées sur le
point
:
.
Énergie potentielle
• Une force
dérive d’une énergie potentielle (notée ) si et
seulement s’il existe une fonction telle
que :
(gradient de ),
c'est-à-dire en coordonnées cartésiennes :
;
;
.
Le travail infinitésimal
donne dans ces conditions une intégrale
indépendante du trajet suivi pour aller de
à
(la
fonction
est une
“fonction d’état”).
◊ remarque : si le travail ne
dépend que du point de départ et du point d’arrivée, alors le
travail sur un trajet fermé est nul.
◊ remarque : compte tenu de la définition, seules les variations
de
interviennent, donc l’énergie potentielle est définie à une
constante additive près (dépendant du choix arbitraire de la
référence).
• Par exemple, pour une force de pesanteur uniforme :
;
;
donc
où est une
constante arbitraire.
• De même, pour une force subie par une particule de charge soumise à un
champ électrostatique
uniforme :
;
;
donc
où
est une
constante arbitraire.
Par contre, pour la force électrostatique causée sur par une autre
charge ponctuelle
placée en :
;
;
donc
où
est une
constante arbitraire.
• Dans le cas d’un ressort disposé entre et :
;
;
donc :
où
est une
constante arbitraire.
• Les forces de frottement ne dérivent pas d’une énergie potentielle
puisque le travail des frottements sur un trajet fermé est non nul.
Ce travail est toujours résistant, par exemple :
; .
◊ remarque : on dit que ces forces sont “dissipatives” d'énergie
mécanique ; l'étude énergétique complète nécessite alors de prendre
en compte l’énergie thermique.
◊ remarque : pour la réaction normale
au contact d'un solide, le travail est nul :
; mais on ne peut pas écrire : “
” puis “
” (constante arbitraire) car
(
ne dérive pas d’une énergie potentielle).
📖 exercices n° I et II.
Théorème de l’énergie mécanique
• Pour un point matériel soumis uniquement à des forces dérivant
d’une énergie potentielle, on peut poser
d’où on déduit le théorème de l’énergie cinétique : .
En définissant alors une “énergie mécanique” par
, la relation précédente s’écrit :
(l’énergie mécanique est constante).
◊ remarque : les forces qui ne font pas varier sont dites
“conservatives” de l’énergie mécanique :
- les forces qui dérivent d’une énergie potentielle sont
conservatives ;
- celles qui ne dérivent pas d’une énergie potentielle mais dont
le travail est nul (comme la réaction normale
) sont aussi conservatives de .
• Pour un point soumis à :
- des forces
dérivant d’une énergie potentielle ;
- des forces
ne dérivant pas d’une énergie potentielle ;
on peut écrire plus généralement : .
Ceci peut s’écrire :
(théorème de l’énergie mécanique) où ne sont considérés à droite
que les travaux des forces non conservatives de
.
◊ remarque : le théorème de l’énergie mécanique n’apporte pas
d’autre d’information que le théorème de l’énergie cinétique ; il ne
fait qu’en donner une autre expression, plus pratique si on connaît
l’énergie potentielle.
Application à l’étude des mouvements
• Pour un tir de projectile en l’absence de frottement :
est constante, par suite :
; cette relation ne résout pas le problème du mouvement
(calcul de et ), mais
peut dans certains cas apporter une information utile en évitant des
calculs plus compliqués.
• Pour le glissement sans frottement d’un point à la surface d’une
sphère :
est constante, mais avec un mouvement plus contraint :
et
; donc
: (pour un départ
avec vitesse nulle), équation qui pourrait donner .
📖 exercices n° III et IV.
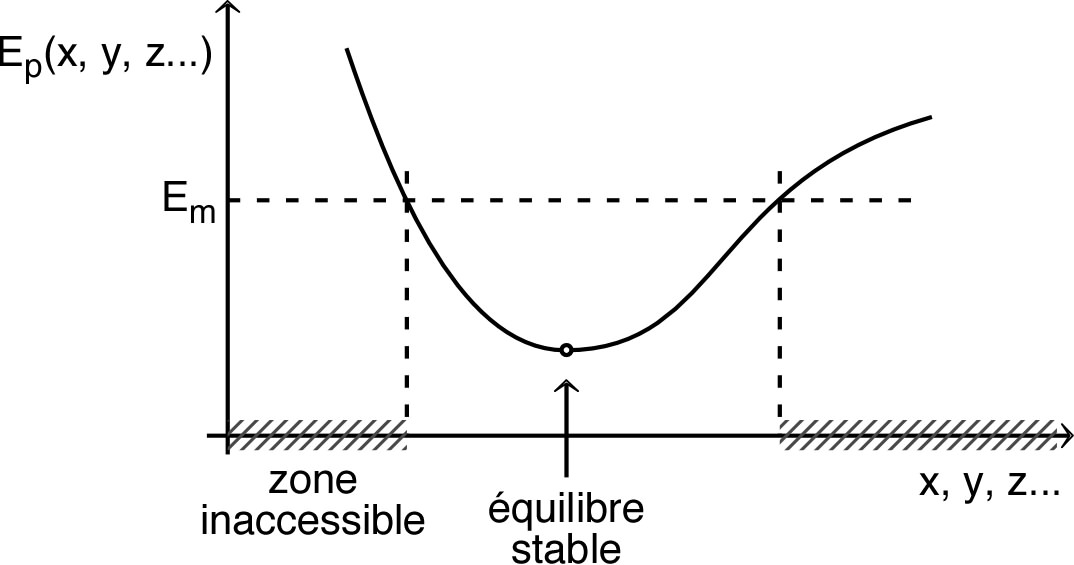
Application à l’étude des équilibres
• Puisque l’énergie cinétique est toujours positive, le point étudié
ne peut pas se déplacer dans les régions de l’espace où
(“barrière” et “puits” d’énergie potentielle) :
Dans le cas d’un puits d’énergie potentielle, le point oscille entre
des positions extrêmes (oscillations amorties s’il y a en plus
des frottements).
• Le sens de la force
montre que les équilibres stables correspondent aux minimums
relatifs de
(“force
de rappel”) et que les maximums relatifs correspondent à des
équilibres instables.
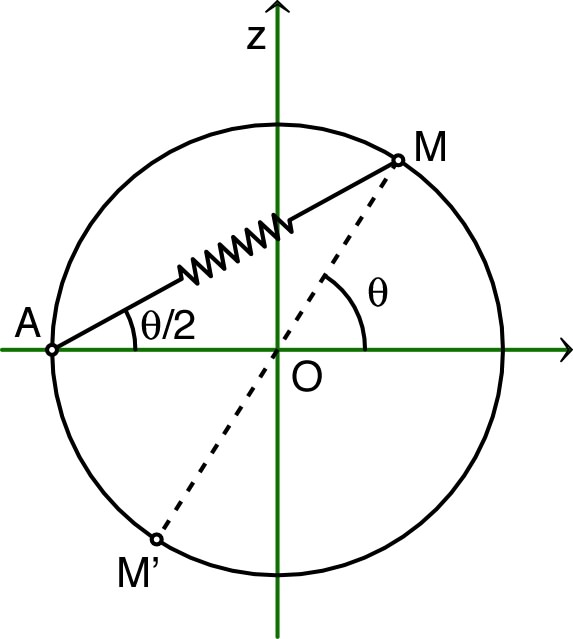
• Soit par exemple un point
mobile sans frottement sur un cercle de rayon ,
maintenu depuis le point par
un ressort de masse négligeable, de raideur et de
longueur “à vide”
.
On obtient :
où
et
(la réaction normale a un travail nul, qu’on peut omettre
dans le raisonnement basé sur l’énergie). |
|
|
• On peut dans ce cas décrire la position avec la variable car le
déplacement d'une longueur d'arc
est simplement proportionnel à (cela ne
change ni le signe, ni l'annulation des dérivées).
• L’équilibre impose extremum :
.
Cette équation se simplifie si
:
;
;
on en déduit les deux points et tels
que :
.
• L’équilibre stable impose minimum :
.
Compte tenu de la relation vérifiée à l’équilibre, cette relation
correspond à :
;
l’équilibre est donc stable en et
instable en .
◊ remarque : si n'est pas
tout à fait négligeable, un développement à l'ordre le plus bas
donne un décalage en
.
📖 exercices n° V et VI.