• Compte tenu de la quasi-instantanéité du choc, on peut considérer que la vitesse reste horizontale (perpendiculaire à la portion extrême du fil), donc le vecteur vitesse est conservé lors du choc.
| 1. | • Pendant le choc, quasi-instantané, la
vitesse est horizontale donc le poids ne travaille pas ; en
outre la vitesse est toujours perpendiculaire à la tension
du fil et cette tension ne travaille donc jamais. Au total
l’énergie cinétique du point matériel
reste constante et la norme du vecteur vitesse est
conservée. • Compte tenu de la quasi-instantanéité du choc, on peut considérer que la vitesse reste horizontale (perpendiculaire à la portion extrême du fil), donc le vecteur vitesse est conservé lors du choc. |
|
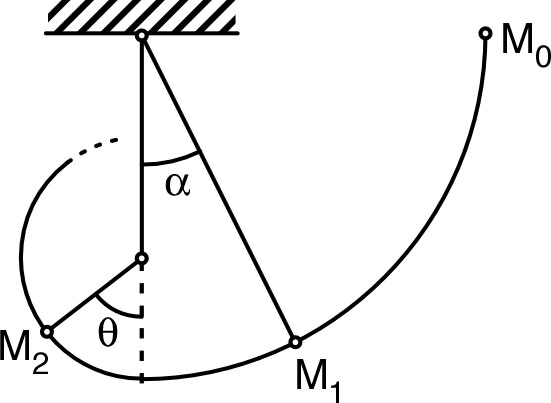
| 2. | • Le problème se ramène à celui d’une fronde
de longueur
dont le mobile est lancé dans la position d’équilibre avec
une vitesse qui
est celle atteinte par lors
du choc. ◊ remarque : ceci suppose qu’on néglige le “raccourcissement” progressif du fil dû à son enroulement sur une tige de diamètre non nul (on néglige le diamètre de la tige) ; mais le raisonnement ainsi obtenu est correct même si cela change légèrement les coefficients numériques des formules... • D’après le théorème de l’énergie cinétique entre l’instant initial et l’instant du choc, l’énergie cinétique atteinte est : ; par suite : . • De même, d’après le théorème de l’énergie cinétique entre l’instant du choc et un instant quelconque précédant le passage au sommet : et en particulier lors du passage au sommet (s’il est atteint) : ; par suite une condition nécessaire pour que le sommet soit atteint est : et donc : . • En appliquant la relation fondamentale de la dynamique après le choc : et en projetant sur le vecteur des coordonnées polaires, on obtient : . La condition de tension du fil est alors : ; mais compte tenu de la relation de l’énergie cinétique, ceci correspond à : quel que soit . En particulier pour le cas limite, il faut : et donc : , condition plus restrictive que la précédente. ◊ remarque : entre ces deux limites, le point peut atteindre la hauteur du sommet, mais le fil se détend et une partie de la trajectoire est parabolique. • On aboutit donc à la condition : d’où on déduit : . ◊ remarque : il faut aussi probablement pour éviter que le point percute le support comportant la fixation en , mais cette condition est automatiquement vérifiée dans le cas précédent et même dès que . |
| 1. | • Les forces exercées par les deux particules
l’une sur l’autre sont opposées (actions réciproques) et ont
forcément la même direction que le segment ,
compte tenu de la symétrie de l’ensemble (si on suppose que
les particules sont effectivement représentables par des
points matériels...). • Si on note le vecteur unitaire orienté comme (c'est-à-dire radial par rapport à ), on peut écrire pour des forces répulsives : et . |
| 2. | • S’il existe une énergie potentielle
pour la particule
soumise à l’action de ,
alors on peut écrire :
où les dérivations sont prises par rapport aux coordonnées
de . • Si existe, elle doit vérifier : avec fixe si on étudie l’influence sur . Mais alors pour : et donc : .• De même pour : et donc : .• On vérifie réciproquement que l’expression ainsi obtenue est solution du problème : où les dérivations sont prises par rapport aux coordonnées de . ◊ remarque : puisque la seule dérivée est et le gradient est : . |
| • Le théorème de l’énergie cinétique peut
s’écrire :
dans la mesure où la seule autre force intervenant, la
tension du fil, ne travaille pas (elle est en permanence
normale à la vitesse). Ceci correspond à :
et
donc l’énergie mécanique
est constante. • Avec l’origine de en et on obtient : . • La dérivation de cette relation donne : . Or la solution correspond au cas particulier sans mouvement constant ; le mouvement est donc décrit par l’équation différentielle : . ◊ remarque : inversement, la quantité constante est appelée “intégrale première” du mouvement car elle correspond à une première intégration de l’équation différentielle du mouvement (équation du second ordre qui peut être intégrée deux fois). |
| • Dans ce plan l’équation différentielle du
mouvement peut être obtenue par la relation fondamentale de
la dynamique :
. • La tension du fil est initialement dans le plan vertical contenant et la direction de . Par la suite, cette force est toujours dans le plan vertical contenant et le fil, donc elle ne peut pas faire changer le plan du mouvement ; il en est de même du poids (vertical). Donc le mouvement se fait en entier dans ce plan. • L’équation différentielle peut ainsi s'écrire en coordonnées polaires : . • La composante orthoradiale donne : , donc : . • Pour “petit” (imposé si est petite), on obtient : ; le mouvement est donc de la forme : avec . Les constantes d’intégration se calculent alors d’après les conditions initiales : donc : et . Ceci correspond à et ; ces deux expressions mathématiques décrivent le même cas physique ; on choisit alors arbitrairement la description avec et , donc : . • Il est toutefois évident que, même qualitativement (compte tenu de l’approximation du sinus), ce type de mouvement n’est pas le seul possible : il se produit forcément un mouvement d’un autre type si dépasse ; en outre on n’a pas tenu compte du fait que le fil souple ne reste pas forcément tendu. • La composante radiale de l’équation différentielle du mouvement s’écrit : avec ; le fil ne reste tendu que si : donc : . • Si on considère alors les mouvements de type oscillants, il faut vérifier la relation précédente même quand la vitesse s’annule ; ceci impose : et . • L’énergie mécanique : est constante puisque la tension du fil ne travaille pas ; on en déduit : . Par suite, le mobile est en principe capable, si le fil ne se plie pas, de monter jusqu’à ce que , c’est-à-dire : . La condition précédente s’écrit donc : , limite des mouvements de type oscillatoire. • Mais d’autre part, si est assez grande pour que la vitesse ne s’annule pas, on peut avoir des mouvements de type rotation périodique à vitesse variable. Ceci correspond aux cas où l’énergie cinétique permet d’atteindre le point à la verticale au dessus de sans que le fil se plie. La première condition s’écrit : quel que soit , donc : avec une limite pour et . La deuxième condition s’écrit : donc pour tout , c’est-à-dire : . Cette condition, plus contraignante, limite des mouvements de type rotation périodique à vitesse variable. • Entre les limites des types de mouvement précédents : , le troisième type de mouvement correspond à un début d’oscillation suivi d’une chute parabolique lorsque le fil se plie, ce qui se produit pour , c’est-à-dire pour . |
| 1. | • La force exercée par la charge fixe sur
la charge ,
mobile selon l’axe ,
peut s’exprimer sous la forme :
avec
. • S’il existe une énergie potentielle pour la charge soumise à l’action de , alors on peut écrire : . • Si existe, elle doit vérifier : ; . • Pour échapper à l’attraction de la charge fixe , la charge mobile doit pouvoir s’éloigner jusqu’à l’infini avec une énergie cinétique ; puisque tend vers la constante limite pour infini, la conservation de l’énergie mécanique donne : . • On obtient ainsi : . |
| 2. | • D’une façon analogue :
.
Par suite :
et donc :
. • En s’approchant de la charge fixe , la charge mobile doit avoir une énergie cinétique ; la conservation de l’énergie mécanique s’écrit alors : et la charge mobile s’arrête quand toute l’énergie mécanique est sous forme d’énergie potentielle. • On obtient ainsi : tel que : ; avec . |
| 1. | • La force résultante est :
et l’équilibre est obtenu quand cette force s’annule :d’où on déduit : . |
| 2. | • La force dérive d’une énergie
potentielle
telle que :
c’est-à-dire :
.
On en déduit :
.
La valeur particulière
conduit alors à
et
. ◊ remarque : la force est radiale, donc l'énergie potentielle ne dépend pas de . • L’équilibre par rapport à correspond à (extremum) et on retrouve ; la stabilité de cet équilibre est décrite par (minimum) et l’équilibre est donc stable. • L’équilibre par rapport aux rotations peut être étudié par l’effet de . Pour fixé, le déplacement est simplement proportionnel aux variations de ; on peut donc raisonner en dérivant par rapport à . L'équilibre correspond à et on peut conclure qu’il y a équilibre de rotation pour tout ; la stabilité de cet équilibre est décrite par et il s’agit donc d’un équilibre indifférent. |
| 1.a. | • L’énergie cinétique peut s’écrire :.• Ceci peut s’écrire : avec . |
| 1.b. | • L’énergie potentielle peut s’écrire :
. • L’énergie mécanique est donc : . |
| 1.c. | • En l’absence de frottement, le point n’est
soumis qu’à des forces conservatives de l’énergie (la
réaction normale du rail ne travaille pas). • La dérivation donne : . Ceci peut se mettre sous la forme : . • On remarque que cela peut correspondre à une “force généralisée” (associée au gradient par rapport à ). Par contre, à part éventuels cas particuliers, ceci ne correspond pas à une “quantité de mouvement” qui serait telle que . |
| 1.d. | • Les positions d’équilibre correspondent à
et
,
donc à
(extremums). • Un équilibre est stable si et seulement si le point matériel, lâché immobile en une position voisine, subit une accélération dans le sens qui tend à le rapprocher de la position d’équilibre. Ceci correspond à avec ; l’accélération se fait donc dans le sens des énergies potentielles décroissantes et l’équilibre est stable si et seulement si (minimum de ). |
| 2.a. | • L’énergie cinétique peut s’écrire :
avec
d'après la définition de
(distance parcourue). Ainsi
avec donc . ◊ remarque : plus généralement, l'expression se simplifie quand le paramètre est une abscisse curviligne proportionnelle à la distance parcourue, ce qui impose avec . |
| 2.b. | • L’énergie mécanique peut s’écrire : . La dérivation donne : . |
| 2.c. | • L'oscillateur envisagé ici correspond à : , donc : ; . |
| 2.d. | • D'après ce qui précède :
.
Ainsi :
. ☞ rappel : l'opérateur de différenciation (noté ) est prioritaire sur les opérations algébriques ; ainsi : . |
| 2.e. | • En posant
,
on obtient :
. ◊ remarque : l'accélération est indirectement provoquée par la pesanteur : ; ainsi . ◊ remarque : il n'y a pas de problème de signe car donc . • Compte tenu du fait que correspond à , qui correspond à , donc à , ceci donne : . |
| 2.f. | • L'expression de
n'est pas facile à inverser pour en déduire
.
On peut toutefois préciser la description paramétrique en
fonction de :
. • La représentation paramétrique décrit une cycloïde. ◊ remarque : on peut inversement exprimer mais l'expression compliquée n'apporte rien de plus. |
| 1.a. | • L’énergie cinétique peut s’écrire :.• Ceci peut s’écrire : avec . |
| 1.b. | • L’énergie potentielle peut s’écrire :
. • L’énergie mécanique est donc : . |
| 1.c. | • En l’absence de frottement, le point n’est
soumis qu’à des forces conservatives de l’énergie (la
réaction normale du rail ne travaille pas). • La dérivation donne : . |
| 2.a. | • L’équation différentielle pour
l’oscillateur harmonique donne :
. • En substituant , on en déduit une équation différentielle du second ordre sur : . |
| 2.b. | • L’oscillation se fait autour d’une position d’équilibre stable, correspondant à un minimum de donc de . On peut donc choisir ce point comme origine, ce qui impose : et . On en déduit la valeur . |
| 2.c. | • Le logiciel Maple trouve une intégrale
première :
mais ne trouve pas de solution formelle de cette dernière. • Faute de mieux on peut tenter une résolution sous forme de développement en série (c'est un peu plus simple en partant de l'intégrale première) : la symétrie impose : . • On en déduit : puis (et ainsi de suite éventuellement). • Une autre méthode consiste à isoler : puis à utiliser la méthode d’Euler. • Pour que le calcul soit possible, il faut que l'amplitude maximale soit atteinte avant que la tangente au rail devienne verticale : , forcément à l'extrémité du rail. Ceci implique de limiter pour un rail donné (dont la forme est imposée par ), mais pour une raideur donnée, la forme du rail dépend aussi de (donc de l'amplitude du mouvement souhaité) ! 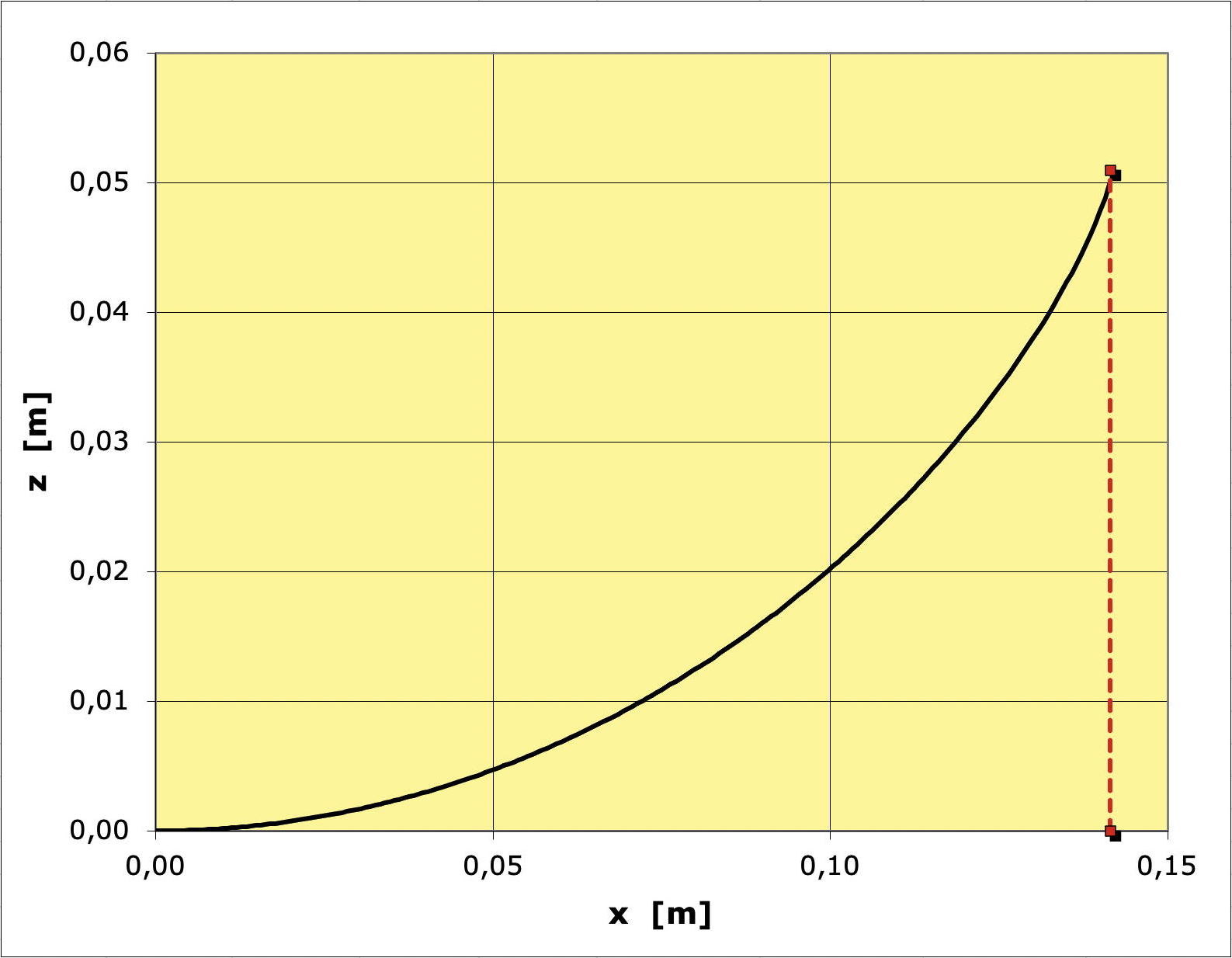 |
| 2.d. | • L’oscillateur harmonique correspond à
:
avec et
.
Ceci donne
puis
. • Cela donne : . |
| 2.e. | • L’équation précédente peut se simplifier en
posant
:.• Le logiciel Maple ne trouve pas de solution formelle ; faute de mieux on peut tenter une résolution sous forme de développement en série : la symétrie impose : . • On en déduit : puis (et ainsi de suite éventuellement). • Une autre méthode consiste à isoler : puis à utiliser la méthode d’Euler. ◊ remarque : cela impose de simplifier astucieusement le début du calcul, pour lequel ; on peut utiliser : avec (ce qui nécessite d'étudier le développement limité). |