M. I - DYNAMIQUE ; PRINCIPE FONDAMENTAL
Masse et principe d’inertie
Masse
• Il est plus facile de mettre en mouvement horizontal (indépendant
du poids) une balle qu’une locomotive ; de même pour arrêter le
mouvement.
On appelle “masse” la grandeur physique exprimant la “tendance” à
résister aux variations du mouvement ; on nomme “inertie” sa
propriété.
• La masse, qui différencie la “dynamique” de la “cinématique”, est
supposée (en mécanique non relativiste) :
- indépendante du mouvement et du référentiel ;
- indépendante du temps et du lieu ;
- additive : la masse totale est la somme des masses des
constituants.
• On constate par ailleurs qu’au voisinage de la Terre (entre
autres) les corps sont d’autant plus pesants qu’ils sont plus
massifs ; ceci met en évidence un autre aspect : la masse “pesante”,
a priori différence de la masse “inerte”.
L’identité de la masse pesante et de la masse inerte n’est pas
évidente, mais c’est une constatation expérimentale (d’où découle la
relativité générale).
• On pose alors par définition que deux masses sont égales si et
seulement si, l’équilibre d’une balance étant obtenu avec l’une des
masses, il est conservé quand on y remplace cette masse par l’autre.
Depuis 1901, on avait ainsi défini un étalon de masse “kilogramme”
(cylindre de platine iridié ; précision
) ; depuis mai 2019, l'unité de masse se déduit de celle
d'énergie par la relation
où
est considérée comme une valeur exacte (précision
relative ).
◊ remarque : l'unité d'énergie est elle même déduite de celle de
temps par la relation de Planck
avec
considérée comme une valeur exacte (précision relative
).
Principe d’inertie et référentiels galiléens
• Deux systèmes sont en “interaction” s’il existe une modification
de l’un qui cause une modification de l’autre. Un système “isolé”
n’a pas d'interaction.
En pratique, il n’existe pas de système “isolé”, à part l’Univers en
entier ; mais on constate que les interactions semblent tendre vers
zéro à grande distance : les systèmes très éloignés sont donc
supposés “quasi-isolés”.
◊ remarque : au niveau microscopique, il est impossible d’observer
un système strictement isolé car l'observation est une interaction
non négligeable.
• Le “principe de l’inertie” suppose qu’il existe des référentiels
dans lesquels le mouvement de tout point matériel isolé
est rectiligne et uniforme ; on les appelle “référentiels
d’inertie” ou “référentiels galiléens”.
• Un référentiel lié à la Terre est approximativement galiléen pour
de nombreuses expériences ; par contre il ne l’est pas pour l’étude
d’un mouvement dépendant de la rotation de la Terre sur elle même.
Le référentiel de Copernic est “mieux” galiléen : centré au
barycentre du système solaire et orienté par rapport à des étoiles
lointaines (pour que leur mouvement soit négligeable par effet de
“perspective”). Il est toutefois insuffisant pour l’étude d’un
mouvement dépendant de la rotation de la galaxie…
• Si un référentiel est galiléen, alors tous les référentiels
animés par rapport à lui d’un mouvement rectiligne et uniforme
sont aussi galiléens (d’après la loi de composition des vitesses)
; inversement, tous les référentiels animés par rapport à lui d’un
mouvement accéléré sont non galiléens.
Principe fondamental de la dynamique
Quantité de mouvement
• Pour un système de deux points matériels et , on peut
définir un centre de masse par la
relation :
.
Pour un tel système isolé, on vérifie expérimentalement, dans tout
référentiel galiléen, la conservation de la quantité :
.
Ceci conduit à considérer que la grandeur importante pour décrire
le mouvement des points matériels (c'est-à-dire la “dynamique”)
n’est pas la vitesse mais la “quantité de mouvement” (ou
“impulsion”) :
.
◊ remarque : ces relations ne sont plus valables en mécanique
relativiste.
Forces
• Dans un référentiel galiléen, si un point matériel a un mouvement
rectiligne et uniforme, c’est soit qu’il est isolé, soit qu’il est
soumis à plusieurs interactions qui se compensent (“pseudo-isolé”).
Si au contraire il a un mouvement non rectiligne ou non uniforme
(vitesse non constante, accélération non nulle), on peut considérer
qu’il est soumis à une interaction (ou plusieurs interactions qui ne
se compensent pas).
• Les interactions peuvent alors être décrites par des quantités
vectorielles : les forces. Le rôle important de la quantité de
mouvement conduit à définir celles-ci d’après les variations
de
(plutôt que celles de
) :
(“principe fondamental” de la dynamique ; PFD).
◊ remarque : puisque la masse est constante :
, mais cette relation n’est plus valable en mécanique
relativiste.
◊ remarque : pour un système de points, des forces peuvent aussi
causer des rotations ou des déformations (mais c’est impossible pour
un point).
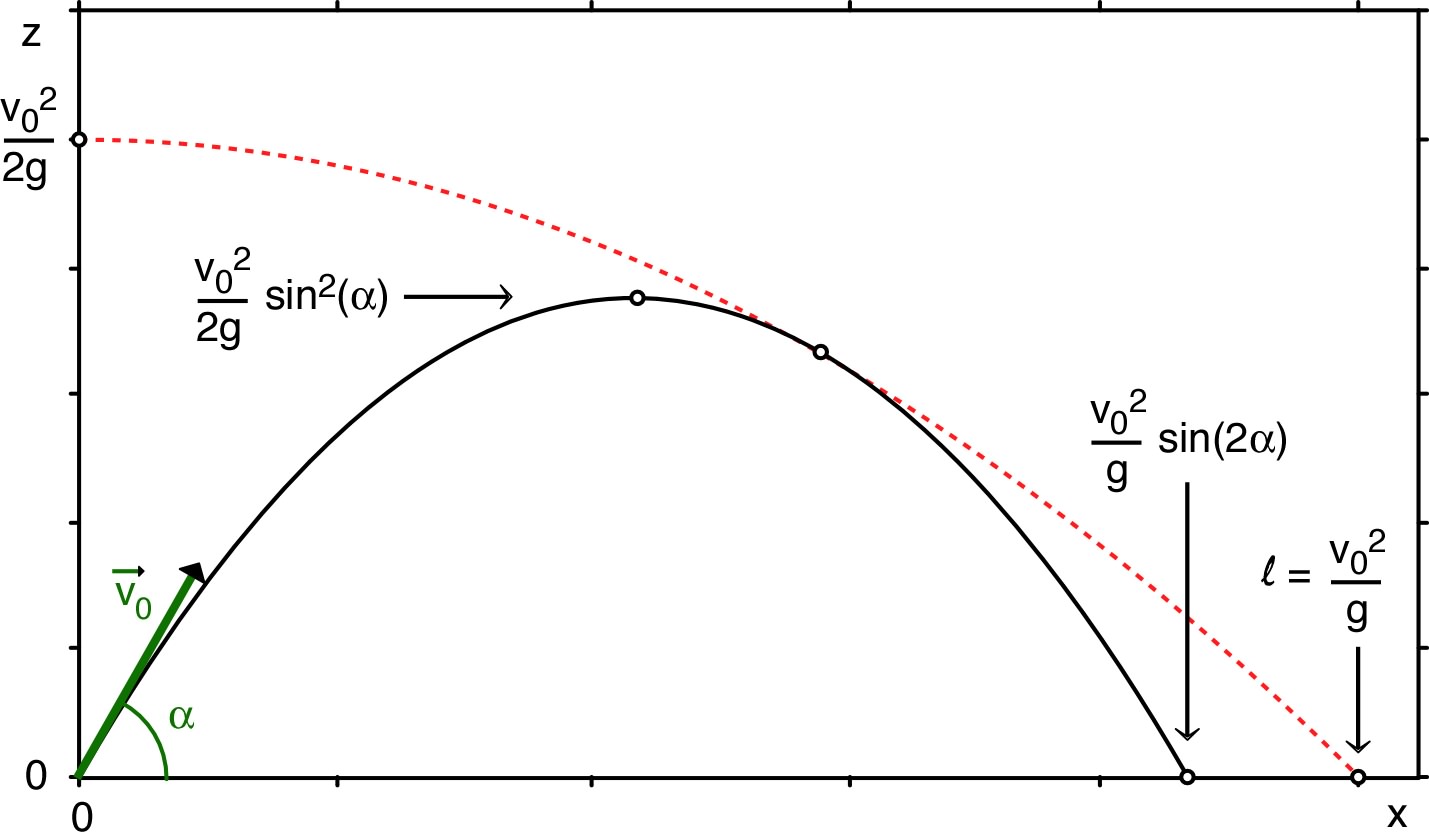
Exemple d’application : tir d’un projectile
• En première approximation, on peut souvent négliger le frottement
sur l’air : le projectile (représenté par son centre d’inertie,
point matériel) est alors soumis uniquement à la pesanteur
: .
En supposant
uniforme, on obtient alors compte tenu des conditions initiales
:
;
;
.
Ainsi, par différentes combinaisons des équations en projection :
- l’équation de la trajectoire est :
;
- l’équation de la “parabole de sûreté” est :
;
- l’altitude maximum atteinte est : ;
- la “portée” est : (en
trajectoire “rasante” ou “plongeante”) ; la portée
maximum est :
(pour
).
📖 exercices n° I et II.
Principe des actions réciproques
• Toute interaction correspond à deux actions réciproques ;
l’étude complète dépasse donc l’étude d’un point matériel,
mais certains aspects en sont utiles pour calculer les forces
exercées sur le point étudié.
• Si on considère un système de deux points matériels qui
interagissent entre eux mais tels que l’ensemble est isolé, alors
pour le système :
est un vecteur constant ; par suite :
.
Ceci peut se généraliser en un “principe des actions réciproques”,
qui est valable dans de très nombreux cas :
.
◊ remarque : en mécanique quantique, les interactions sont décrites
par des “champs” qui se propagent ; avec les délais de propagation,
ce principe n’est alors applicable que dans un sens beaucoup plus
restreint.
Principe de relativité de Galilée
• Le principe “fondamental”
n’est lié qu’à la variation de vitesse, donc il s’exprime de
la même manière dans deux référentiels galiléens, animés l’un par
rapport à l’autre d’un mouvement rectiligne et uniforme.
Cela dépend en fait des hypothèses : de et aussi on
déduit : .
On peut exprimer ceci comme “principe de relativité de Galilée” :
les lois de la mécanique sont invariantes lors du passage d’un
référentiel galiléen à un autre référentiel galiléen.
◊ remarque : pour l’étude de la propagation de la lumière, on
constate que ce principe est en contradiction avec l’expérience ; il
faut alors adopter le principe de relativité d’Einstein, basé sur
d’autres hypothèses (“relativistes”, avec entre autres ), qui
généralise l’invariance à toutes les lois physiques.