| 1.
|
• La relation fondamentale de la dynamique de
translation peut s’écrire :
puisqu’on néglige les autres effets.
• Compte tenu des conditions initiales, une première
intégration donne :
; une seconde intégration donne : .
• Le mouvement est en entier dans le plan vertical défini
par la position et
les directions de
et
; on peut donc raisonner avec deux coordonnées
et dans
ce plan.
• Si on prend
comme origine, on cherche à obtenir :
maximum (où est
l’angle de
avec l’horizontale), tout en imposant :
. Aucune condition n’étant imposée sur la durée du
trajet, seule la trajectoire importe et on peut obtenir son
équation en éliminant
:
. Le maximum est
alors obtenu en choisissant la valeur de la
plus efficace.
• On peut ensuite considérer que si, pour
fixé, on pouvait ajuster afin
d’atteindre
, alors (puisque le point finit
toujours par retomber) il serait forcément possible
d’atteindre
avec un
. Autrement dit : pour
le point d’altitude
se trouve forcément sur la parabole du sûreté (le plus haut
qu’il est possible d’atteindre en ajustant
pour
donné).
◊ remarque : cette “équivalence” simplifie beaucoup le
calcul car il est plus facile de chercher l’extremum
de
pour fixé
(l’équation de la trajectoire est quadratique en et
linéaire en ).
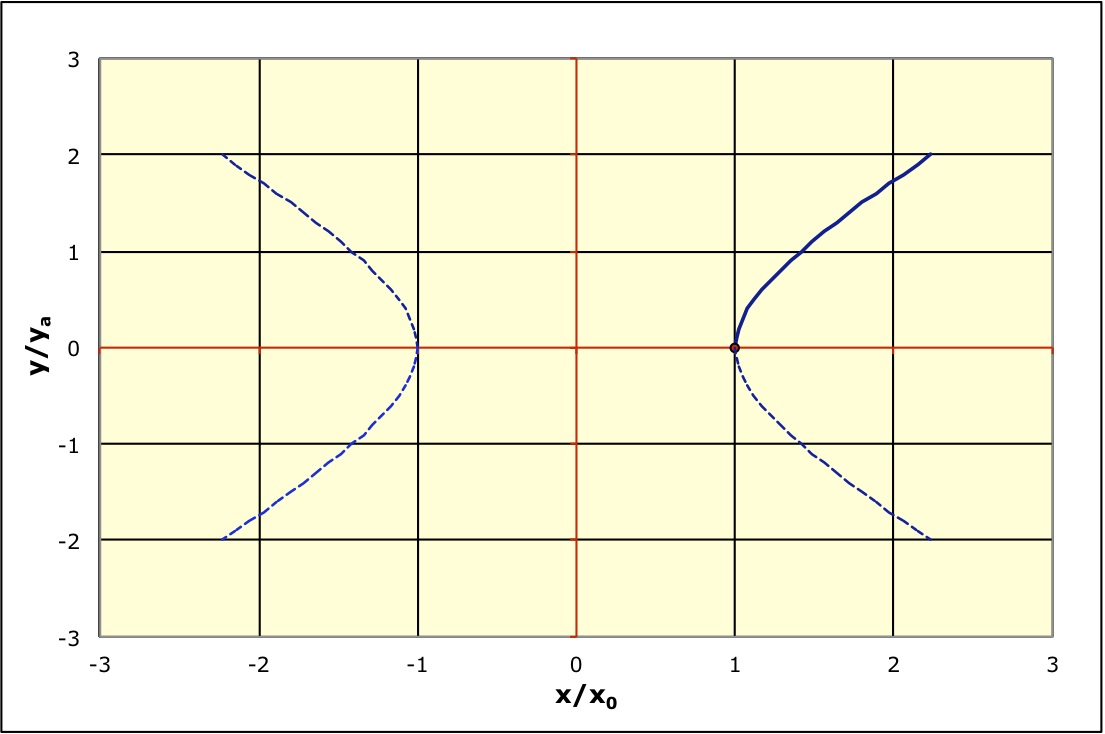
• Pour établir l'équation de la courbe de sûreté, on peut
commencer par simplifier les notations en posant (par
exemple) :
et
; on obtient ainsi :
.
• Pour chercher le maximum, on peut ensuite dériver cette
relation par rapport à (cela
revient au même que de dériver par rapport à ) en
considérant fixé
: .
• Le maximum cherché est tel que
c’est-à-dire :
. Il suffit alors de remplacer dans l’expression
de
: (c'est
l’équation de la parabole de sûreté).
• Inversement, en imposant dans cette équation
, on obtient :
.
◊ remarque : en négligeant les frottements sur l’air, la
précision est médiocre pour une telle distance.
◊ remarque : on obtient aussi :
et
. |