M. II - DYNAMIQUE ; FORCES
Différents types de forces
• L'application du principe de la dynamique nécessite d'établir un
bilan des forces ; certaines peuvent être décrites par des “actions
à distance” :
- force de gravitation (pesanteur) ; grande portée, mais faible
;
- forces électro-faibles :
- électromagnétiques ; grande portée, compensation des + et
- ;
- nucléaires faibles ; courte portée ;
- forces nucléaires fortes ; très fortes, mais courte portée.
À notre échelle, certaines forces (électriques au niveau
microscopique) sont bien décrites par des “actions de contact”
(portée apparente “nulle”).
Forces de contact dans un fluide
Caractéristiques générales
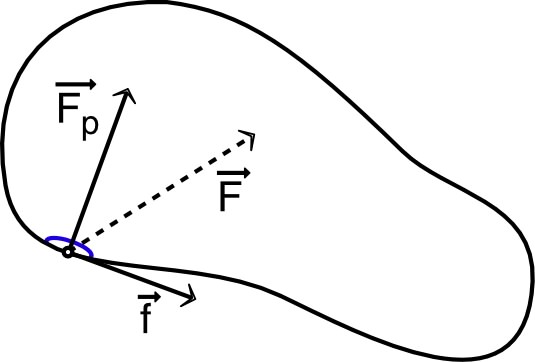
• Sur chaque “élément de surface”
d’un objet au contact d’un fluide (liquide ou gaz), la
“force de contact” peut être décrite en deux composantes :
- une force pressante (normale) ;
- un frottement (tangentiel).
|
|
|
◊ remarque : certains systèmes (par exemples les bulles) peuvent
être décrits par des forces tangentielles de “tension superficielle”
(forces de “capillarité”), non étudiées ici.
• À l'équilibre, il n'y a généralement pas de frottement ;
la résultante des forces pressantes sur l’ensemble de l’objet est
la poussée d’Archimède. Cette force est égale à l’opposé du poids
du fluide “déplacé” par l’objet.
◊ remarque : certains “fluides pâteux” (peintures, suspensions de
poudre solide dans un fluide) peuvent comporter un frottement non
nul à l'équilibre.
| • Pour un objet en mouvement dans un
fluide, la résultante des forces de contact sur l’ensemble
de sa surface n'est pas simple à calculer. |
|
|
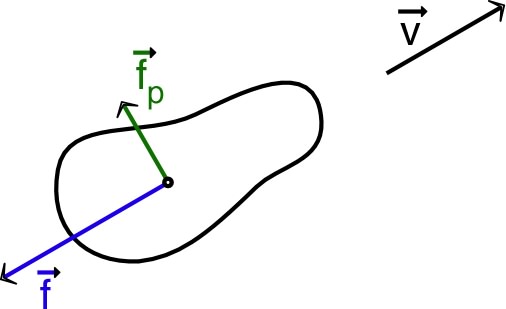
On peut souvent la décrire en ajoutant :
- une force de traînée cinématique (souvent nommée à tort
“frottement”), parallèle et de sens contraire au mouvement
relatif (
) ;
- une force de portance, perpendiculaire au mouvement relatif.
La traînée cinématique (“frottement”) est en première
approximation :
- proportionnelle à la vitesse pour les faibles vitesses
(régime “visqueux”, ou “laminaire”) :
;
- proportionnelle au carré de la vitesse pour les plus grandes
vitesses (régime “turbulent”) : .
• Pour un objet accéléré dans un fluide, il s'ajoute aussi
un effet de traînée dynamique, environ proportionnelle et de sens
contraire à l'accélération.
◊ remarque : cet effet est souvent négligé mais n'est pas toujours
négligeable.
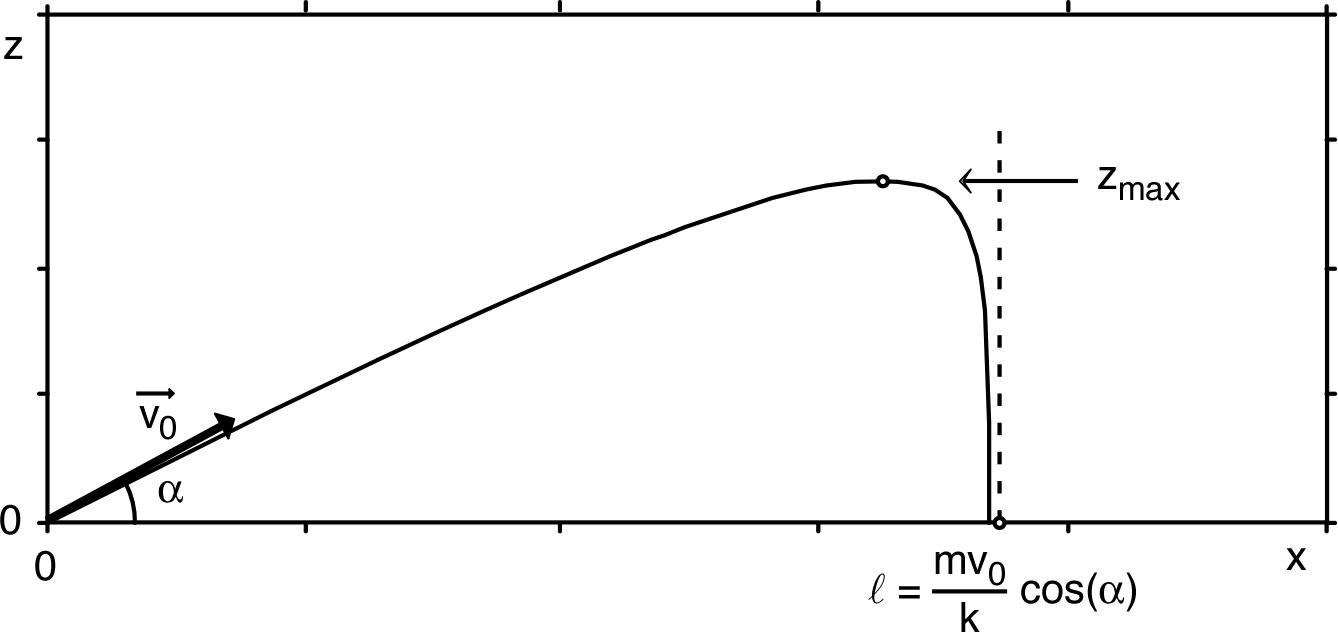
Lancer avec frottement fluide laminaire
• On considère le lancer d’un projectile :
avec un frottement sur l’air proportionnel à la vitesse (faible)
:
.
• Pour
uniforme, on obtient l’équation linéaire :
. Une solution particulière est : ;
la solution générale de l’équation homogène est :
où
est une constante d’intégration.
D’après les conditions initiales :
; donc (avec
) : .
• On peut ainsi en déduire :
- l’altitude maximum :
;
- la portée “limite” :
(presque atteinte si
).
📖 exercices n° I et II.
Forces de contact entre solides
Caractéristiques générales (loi de Coulomb)
• Sur chaque élément de surface, la “force de contact” peut être
décrite par une force pressante (normale) et un frottement
(tangentiel).
• Pour deux solides en contact, la résultante des forces pressantes
sur une portion de la surface de contact est souvent appelée
“réaction normale”.
Par l’effet d’élasticité microscopique des solides, cette force
s’adapte à la valeur juste nécessaire pour empêcher la traversée
mutuelle des solides.
• Quand il n’y a pas de glissement, le frottement “solide” s’adapte
(en direction, sens et norme) à la valeur juste nécessaire à éviter
le glissement.
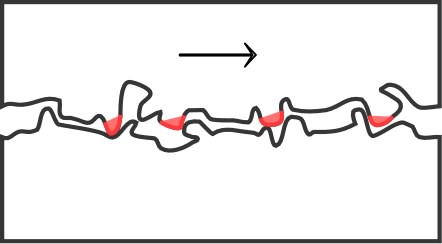
Ceci peut généralement être modélisé par l'interaction des
aspérités, éventuellement microscopiques (1). Mais quand la taille
des aspérités devient de l'ordre de grandeur de la dimension
atomique, certains aspects du frottement peuvent devenir différents
(2).
(1)
Les aspérités emboîtées s'opposent au déplacement.
La limite de glissement est atteinte quand la déformation
des aspérités permet le déplacement.
L'accroissement de la réaction normale augmente les
déformations nécessaires au glissement. |
|
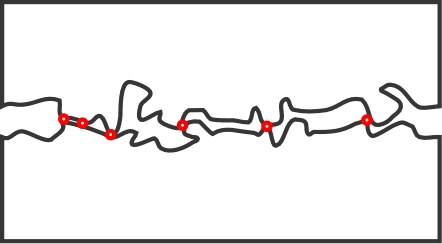
(2)
Des atomes des aspérités en contact se lient, s'opposant
ainsi au déplacement.
La limite de glissement est atteinte quand les liaisons se
rompent (avec déformation des aspérités).
L'accroissement de la réaction normale augmente le nombre de
liaisons (“adhésion”). |
La limite de glissement correspond à un frottement maximum
proportionnel à la réaction normale :
avec un coefficient
qui
dépend :
- de la rugosité de surface ;
- de l’élasticité microscopique ;
- de l’adhésion à l'échelle atomique.
◊ remarque : la rugosité augmente généralement le frottement si plus
d'aspérités s’accrochent, mais la rugosité à l'échelle atomique
diminue le frottement s’il y a moins de points d’adhésion.
◊ remarque : pour des surfaces “lisses” usuelles, la surface de
contact réelle est moins de
de la surface de contact apparente.
• Quand il y a glissement, le frottement est opposé au sens du
mouvement (relatif) et de norme inférieure mais voisine du
frottement maximum :
avec
(et souvent
).
◊ remarque : le frottement de glissement dépend des vibrations
associées aux “accrochages-décrochages” au niveau des aspérités (le
frottement est fort s’il se produit des vibrations correspondant à
une fréquence de résonance des solides en contact).
◊ remarque : en présence d’un lubrifiant, le frottement limite sans
glissement est en général nettement diminué, par ailleurs la norme
du frottement avec glissement peut dépendre de la vitesse.
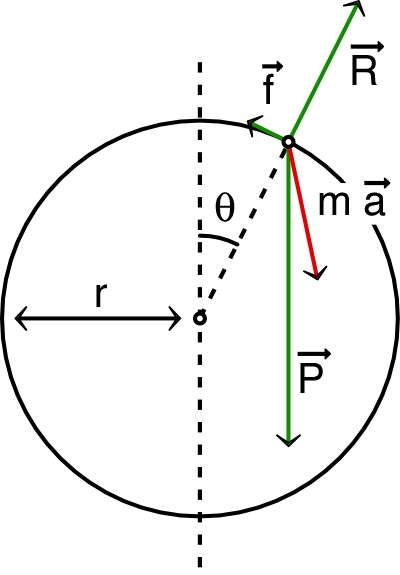
Glissement d’un point sur une surface
• On étudie le mouvement d’un point, mobile sur une sphère de rayon
, lâché près
du sommet avec une vitesse initiale nulle ; ce point est alors
soumis à : son poids
; la réaction normale
; le frottement
.
Le principe fondamental de la dynamique peut s'écrire : .
• Compte tenu de la géométrie de l'expérience, le mouvement est dans
un plan vertical. En effet,
est vertical et
radiale ; en outre :
- initialement
est parallèle et de sens contraire à la projection tangentielle
de
, c’est-à-dire dans le même plan vertical, qui est donc celui
dans lequel le mouvement débute ;
- ensuite
est parallèle à la vitesse, c’est-à-dire dans le même plan
vertical, qui est donc celui dans lequel le mouvement se
poursuit.
En coordonnées polaires, avec
mesuré à partir de la verticale, on obtient (lors du
mouvement) :
;
;
;
;
.
On aboutit ainsi aux deux équations :
|
; |
(1) |
|
; |
(2) |
liées par la condition :
(dépendant de ). |
|
|
• L’hypothèse du mouvement suppose toutefois que le frottement
initial n’est pas trop grand :
(où
est un décalage indispensable pour que le point ne soit pas en
équilibre au voisinage du sommet).
• Dans l'équation (1) : et
donc :
(3).
Le glissement initial correspond à
avec
, d'où on déduit :
pour une surface usuelle “peu rugueuse”.
• L'équation différentielle (3) ne peut s’intégrer
simplement que dans le cas particulier, d'un intérêt limité,
où
(frottement négligeable).
Dans ce cas, en multipliant par
: d’où on déduit,
vu les conditions initiales :
; cette relation décrit la conservation de l'énergie
mécanique.
◊ remarque : la seconde intégration ne peut pas se faire simplement.
• L'équation (2) peut alors s’écrire (pour ) :
;
ceci donne, dans le cas particulier
(frottement négligeable) :
.
La condition de contact ( )
impose : . Le
point quitte ensuite la surface et continue en chute libre
parabolique.
◊ remarque : le contact est dans ce cas “unilatéral” : la traversée
est impossible mais la séparation est possible d’un côté (par
contre, pour un anneau coulissant le long d’un fil, la liaison
serait multilatérale).