| 1.a. | • La relation fondamentale de la dynamique de
translation peut s’écrire :
. On en déduit que tout le mouvement se fait suivant
la direction et le sens de la vitesse initiale et
qu’algébriquement :
; par suite, compte tenu des conditions initiales
:
. • La distance parcourue en une durée est : . |
| 1.b. | • La distance totale que peut parcourir le point est : donc : . |
| 2. | • D’une façon analogue :
et
. • L’application numérique donne : ; . |
| 3. | • Puisque la force n'est pas constante, il
faut calculer le travail infinitésimal sur un petit
déplacement élémentaire, puis intégrer sur le déplacement
total. • D’après : on obtient : .◊ remarque : on retrouve le théorème de l’énergie cinétique. • L’application numérique donne : ; (le travail limite n’est pas encore atteint, mais la différence est inférieure à l’incertitude de mesure). ◊ remarque : car le travail du frottement est résistant. |
| 1.a. | • La relation fondamentale de la dynamique de
translation peut s’écrire :
. On en déduit que tout le mouvement se fait
suivant la direction et le sens de la vitesse initiale et
qu’algébriquement :
c'est-à-dire :
. • Compte tenu des conditions initiales, on en obtient : puis . • La distance parcourue en une durée est : . |
| 1.b. | • La distance
parcourue par le point est : . • Il est impossible d’expliciter à partir de cette relation, mais on peut par exemple résoudre implicitement par approximations successives. En partant de (ordre de grandeur raisonnable) au numérateur, on obtient : ; avec cette valeur au numérateur, la seconde approximation donne : ; ...de même ensuite : ; la suite converge vers . ◊ remarque : cela peut bien sûr être fait automatiquement par une calculatrice. |
| 2. | • D’une façon analogue :
et donc :
. • L’application numérique donne : . |
| 3. | • Puisque la force n'est pas constante, il
faut calculer le travail infinitésimal sur un petit
déplacement élémentaire, puis intégrer sur le déplacement
total. • D’après : on obtient : .◊ remarque : on retrouve le théorème de l’énergie cinétique. • L’application numérique donne : . ◊ remarque : car le travail du frottement est résistant. |
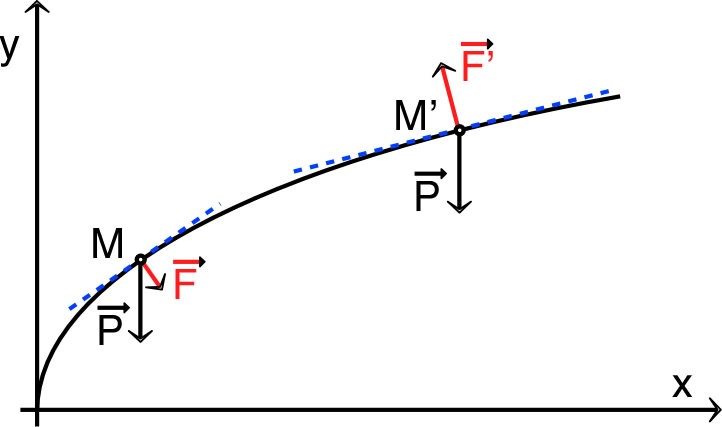
| 1. | • La courbe est une parabole dont l'axe de
symétrie est l'axe horizontal . |
| 2.a. | • Les variations du vecteur position correspondent à et donc le long de la courbe : est forcément tangent. |
| 2.b. | • Pour obtenir un vecteur tangent unitaire
(vers la droite, donc ascendant), il suffit de diviser le
vecteur précédent par sa norme, ce qui peut s'écrire
:
. • Pour obtenir un vecteur unitaire normal (vers le bas), on peut appliquer une rotation de , ce qui change en et en : . |
| 2.c. | • L'expression générale de la vitesse est
:
. • Avec l'expression générale de l'accélération est : c'est-à-dire : . |
| 3.a. | • La relation fondamentale de la dynamique
peut s’écrire :
donc : . • La projection sur la normale donne : . ◊ remarque : il faut raisonner algébriquement, car on ne connaît pas a priori le sens de . |
| 3.b. | • En l'absence de frottement, la réaction est
normale et ne travaille pas ; le théorème de l'énergie
mécanique peut s'écrire :
donc :
. • D'après ce qui précède : et par conséquent : . |
| 3.c. | • On en déduit par substitution : . |
| 3.d. | • On constate que, peu après le départ (
petit) :
; la réaction est dans le sens de
, c'est-à-dire vers la droite : pour déplacer le mobile le
long du rail, il faut qu'une force s'exerce vers la droite ;
or, cela ne peut pas être le poids (vertical). • Au contraire, lorsque le mobile monte “suffisamment”, soit , la réaction est dans le sens contraire de , c'est-à-dire vers la gauche : lorsqu'il monte, le mobile finit par s'arrêter et redescendre, mais si on raisonne sur la projection horizontale du mouvement, il faut pour cela qu'une force s'exerce vers la gauche ; or, cela ne peut pas être le poids (vertical). ◊ remarque : on peut préciser avec les notations simplifiées ; on obtient ainsi avec . ◊ remarque : la tendance intuitive à s'imaginer que l'action de est principalement de compenser le poids, donc vers le haut, est fausse ; ceci n'est valable que dans des conditions “assez” voisines d'une situation d'équilibre, donc c'est à peu près plausible au voisinage de la position la plus haute du mouvement, mais c'est faux au début. |