On peut ainsi écrire : ;
; ;
;
.
avec vitesse d’entraînement (vitesse du “point coïncidant” : point fixe de qui coïncide avec à l'instant considéré).
avec :
accélération d’entraînement (accélération du “point coïncidant”) ;
accélération complémentaire (ou “de Coriolis”).
;
force d’inertie d’entraînement ;
force d’inertie complémentaire (ou “de Coriolis”).
;
;
.
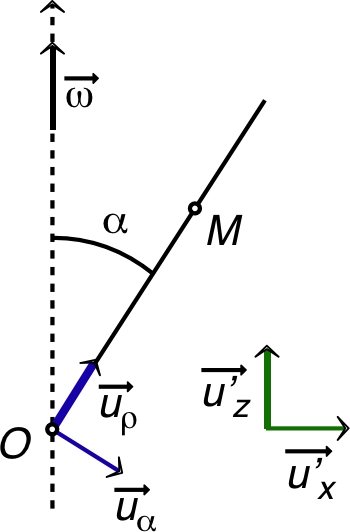
| Afin d’exprimer plus simplement les
différentes quantités concernées, il est alors pratique
d’utiliser dans le plan
une base
avec
orienté selon
. On peut ainsi écrire : ; ; ; |
|
.
.
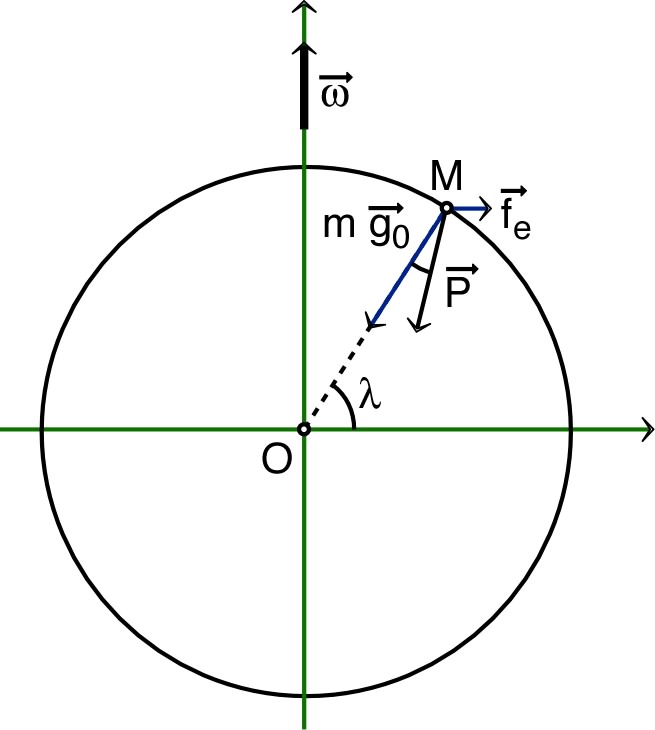
| La vitesse angulaire d’un tour par
jour (
)
cause une force centrifuge
où
est
la latitude. ◊ remarque : la rotation correspond à un tour par jour sidéral ( ). • En exprimant sur la base on en déduit une “déviation” de la verticale (direction du poids) par rapport à la direction radiale : . |
 |
c'est-à-dire :(équation analogue à celle avec force magnétique de Lorentz).
(avec quasi uniforme) ; ;
; .

 |
 |