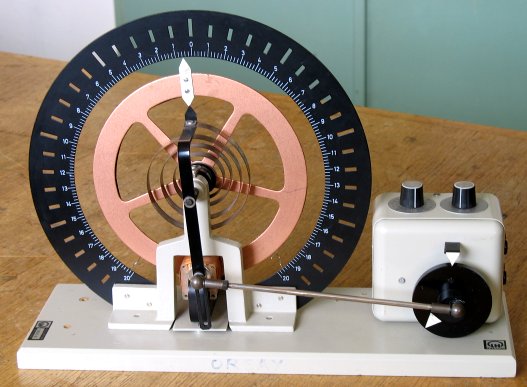
• On utilise un pendule en rotation
(pendule de Pohl) comportant :
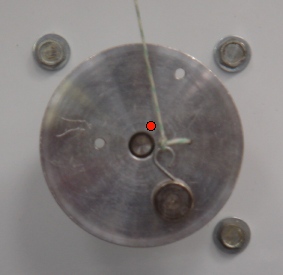
- un disque de cuivre (à évidements) en rotation selon
un axe horizontal, avec un moment d'inertie ;
- un ressort spiral de raideur en torsion ,
dont une extrémité est fixée au disque et l'autre à un
bras articulé lié à un moteur ;
- une graduation circulaire avec une unité
correspondant à l'amplitude imposée par le moteur ( 50
pour un tour) ; des butées élastiques sont placées aux
positions ±20 pour ne pas endommager le montage ;
- un électroaimant au bord du disque, causant un
freinage par courant de Foucault.
|
|
|