• En dérivant la relation : on obtient l’équation du mouvement : ; on peut aussi l'écrire : .
📖 exercices n° I, II, III et IV.

où le coefficient est nommé “raideur” de l’oscillateur.
(charges déplacées) ; ;
(frottement) ; (élasticité) ; ;
; ; ...
.
| ◊ remarque : on peut aussi noter
avec
et
. • En dérivant la relation : on obtient l’équation du mouvement : ; on peut aussi l'écrire : . 📖 exercices n° I, II, III et IV. |
|
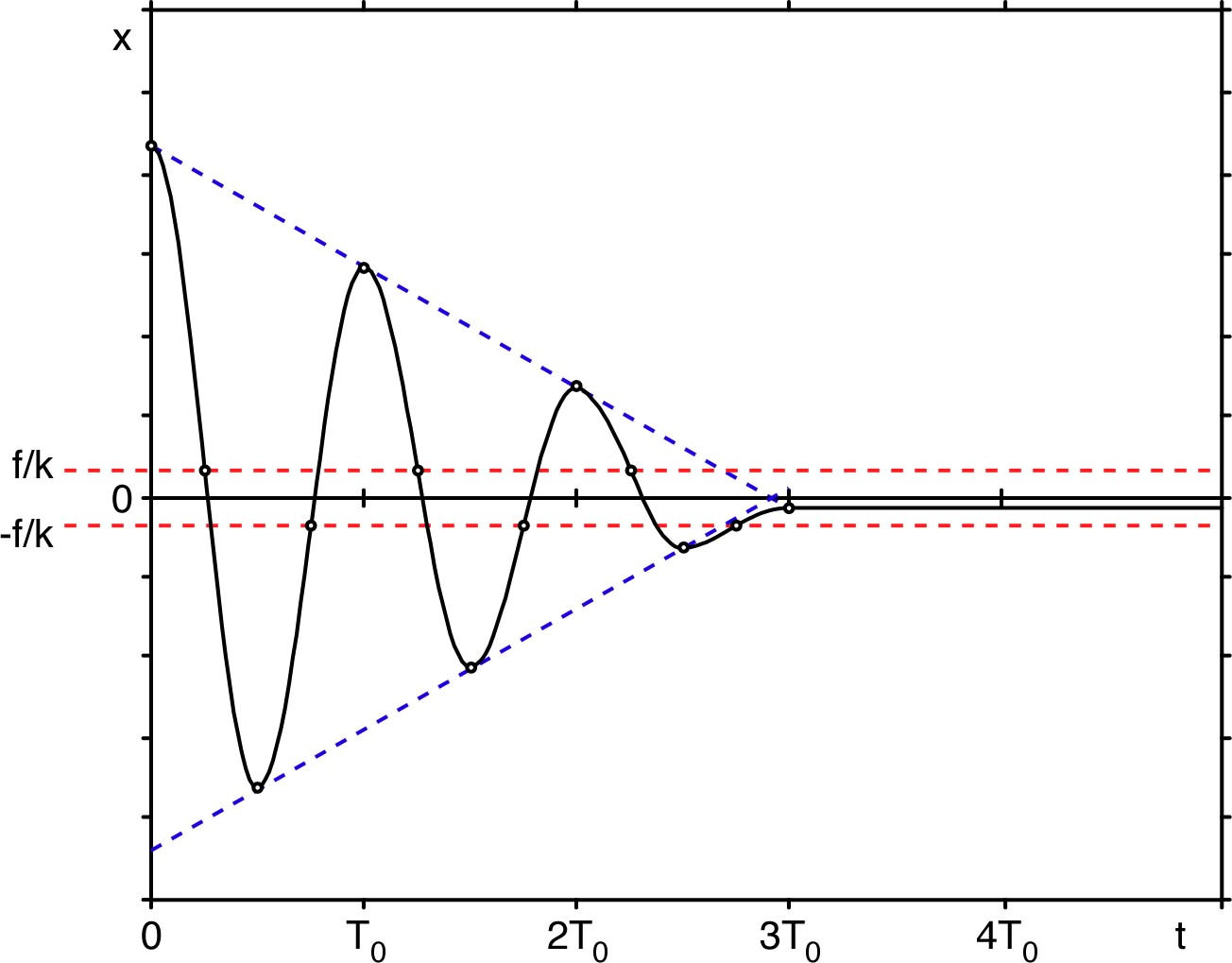
| • On considère un pendule à ressort horizontal avec frottement solide (de coefficient ) et on étudie le cas où il y a oscillation (donc glissement). | 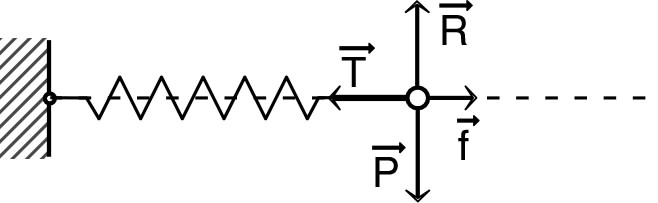 |
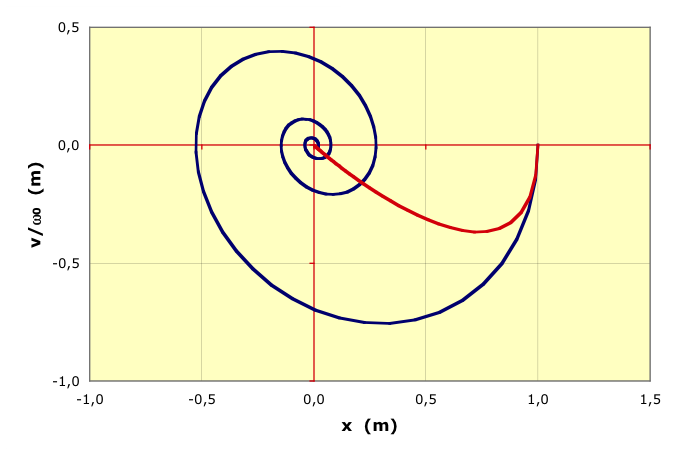
| • On considère ici un pendule vertical
avec frottement visqueux (le coefficient de frottement est
),
réalisé en plongeant la masse
dans un liquide. On peut tenir compte des interactions avec le fluide (poussée d'Archimède...) en “renormalisant” :
|
: régime pseudopériodique, amorti exponentiellement ;
: régime apériodique “critique” (le plus vite amorti) ;
: régime apériodique (amorti plus progressivement).
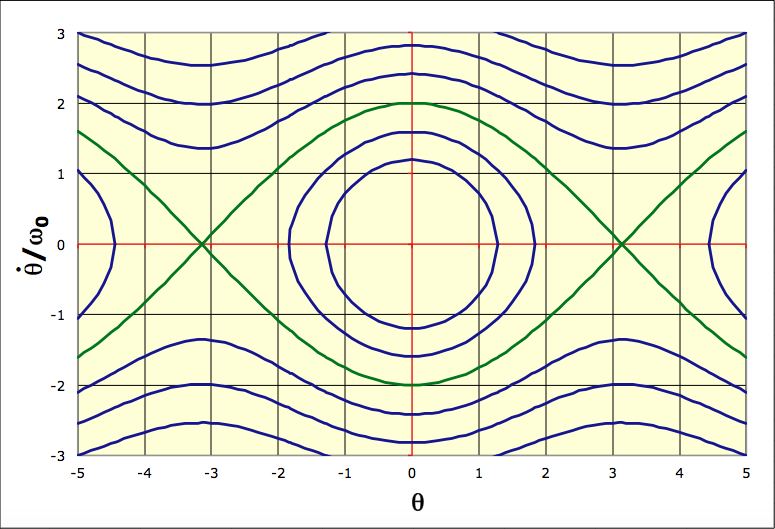
| • Pour le pendule pesant, l’énergie
potentielle peut s'écrire :
et l’équilibre correspond à :
c’est-à-dire à :
(équilibre stable pour
). ◊ remarque : au voisinage de l'équilibre on peut écrire avec et . |
 |