• Par ailleurs donc (minimum) ce qui correspond à un équilibre stable ; mais la condition pour indique que l’autre position d’équilibre est instable (maximum de ).
• La courbe représentative est la suivante :

|
|
• Si le gaz contenu dans le récipient
évolue de façon adiabatique, suivant la loi :
, on peut
écrire en différentiant pour un petit déplacement
:
et donc :
. • L’effet des forces pressantes de l'air sur les deux faces du piston est par conséquent (algébriquement) : . Pour des petites oscillations, on peut considérer en première approximation que : est quasi-constant ; par suite : c'est-à-dire : . • L'équation précédente correspond à un oscillateur harmonique de pulsation : et de période : . • Pour les oscillations de l'air contenu dans le goulot, de masse : , on obtient une fréquence : (avec la masse volumique moyenne usuelle de l'air). |
|
|
• En l’absence de frottement, la réaction
de la surface est perpendiculaire au
mouvement et ne travaille pas. Compte tenu des conditions
initiales (vitesse nulle), la somme des forces reste dans
un plan vertical (celui qui contient le poids, la position
initiale, la réaction
initiale ; c’est donc par symétrie
une section méridienne). Le mouvement se fait donc dans ce
plan méridien et on peut décrire la position du point
matériel à l’aide d’une seule coordonnée, par exemple son
abscisse
. • En décrivant la pesanteur par l’énergie potentielle , l’équation du mouvement découle de la conservation de avec . On obtient ainsi : (en supposant puisqu’on étudie le mouvement et non l’équilibre). ☞ remarque : ce type de raisonnement suppose que l'énergie ne dépend que d'une seule variable de position ; puisqu'on utilise la variable on doit donc substituer . • Dans la mesure où cette équation est compliquée, on peut commencer par raisonner sur les propriétés générales du mouvement. Ainsi, il existe une position d’équilibre stable au “fond” du bol : minimum de l’énergie potentielle. • Par ailleurs, puisque l’énergie cinétique ne peut pas être négative, le mobile ne peut pas remonter plus haut que sa position initiale, donc son mouvement est limité. Or il se déplace sur une courbe (intersection du bol avec le plan méridien contenant le mouvement) donc le mouvement correspond soit à un mouvement périodique (repassant par les mêmes positions dans les mêmes conditions, donc forcément périodique), soit à un mouvement tendant asymptotiquement vers une position d’équilibre. • En pratique, le poids entraîne le mobile vers le bas et ce dernier “accélère” tant qu’il descend ( augmente quand diminue) ; il atteint donc le “fond” du bol avec une vitesse maximum et il passe de l’autre côté sans pouvoir s’arrêter. De l’autre côté, il “ralentit” au fur et à mesure qu’il remonte et retrouve sa hauteur initiale, avec une vitesse nulle, après une durée de remontée égale par symétrie à la durée de descente... et ainsi de suite, donc le mouvement est périodique. • Pour les petites oscillations (au voisinage de l’équilibre), on peut simplifier en : et on en déduit que le mouvement est sinusoïdal, de période : . ◊ remarque : pour simplifier l’expression de on peut envisager de repérer la position par l’abscisse curviligne le long de la courbe parcourue, qui correspond à : donc : ; avec l’intégration par partie, on obtient : d'intérêt limité car cela complique l’expression de ; pour les petites oscillations, on peut toutefois écrire et développer : ; ; ; le terme d’ordre le plus bas montre qu’il y a un équilibre stable pour et une “raideur” donnant des petites oscillations de période ; le terme d’ordre suivant permet éventuellement une étude des plus grandes oscillations par développement limité. |
| 1. | • L’énergie potentielle
donne
donc
(extremum) ce qui correspond à un équilibre ; mais
la condition
indique qu’il existe une autre
position d’équilibre pour
. • Par ailleurs donc (minimum) ce qui correspond à un équilibre stable ; mais la condition pour indique que l’autre position d’équilibre est instable (maximum de ). • La courbe représentative est la suivante : |
| 2. | • Compte tenu de la forme de la courbe
précédente, on voit que le mouvement reste au voisinage
de
seulement si
(la force
exerce un “rappel” vers l’origine tant que le mobile
ne sort pas du “creux”). • L’équation du mouvement peut s’écrire : . Cette équation n’étant pas simple (terme quadratique), il est alors intéressant d’utiliser un développement limité pour . |
| 3. | • Pour
on obtient à l’ordre le plus bas l’équation
simplifiée
qui donne alors la solution
:
avec
et avec une origine des temps appropriée. Ceci
correspond effectivement à la solution du mouvement pour
les très petites amplitudes, c’est-à-dire
. • À l’ordre suivant, on peut chercher une solution de la forme : avec (pour décrire une correction d’ordre supérieur) et inconnue décrivant la forme du terme correctif. • En substituant dans l’équation et en simplifiant par (avec pour le mouvement), on obtient : . En limitant au premier ordre en et , on obtient : . • Ceci donne des oscillations forcées de pulsation autour d’une valeur moyenne . Si on veut écrire la solution sous la forme : , on obtient : et . |
| 4. | • Les valeurs moyennes des cosinus sont
nulles et il reste :
. • Si on suppose qu’on peut appliquer le principe d’équipartition de l’énergie à l’oscillateur anharmonique, dans la limite des petites oscillations, on obtient : . • De on déduit (à l’ordre le plus bas) : et donc : . En reportant alors dans le terme d’ordre suivant, on obtient : , ce qui correspond à un allongement proportionnel à la température (dilatation). |
| 1.a. | • En repérant la position sur le cercle par l’angle , proportionnel au déplacement, les coordonnées de par rapport au centre du cercle sont et . On peut donc exprimer la longueur sous la forme : . |
| 1.b. | • La masse
est soumise à une réaction du cercle, mais cette force ne
travaille pas et peut être omise dans les raisonnements
sur l'énergie. • L'énergie potentielle élastique peut s'écrire : ; l’énergie potentielle de pesanteur est : . • L’énergie mécanique peut s'écrire : . • Les positions d’équilibre correspondent à : . • Il y a donc un équilibre pour , ce qui se limite à si on suppose que le cercle est très incomplet (comme le suggère le schéma de l'énoncé), sinon il y a aussi . • Il peut exister deux autres positions d’équilibre pour tel que : si cette longueur est supérieure à et inférieure à (au plus) (le mobile reste sur le cercle de rayon , même s'il est complet, or l’expression précédente tend vers l’infini quand ). • La condition pour obtenir ainsi correspond à (c'est à dire que le poids doit être suffisant pour imposer un décalage en haut). • La condition pour obtenir ainsi correspond à (c'est à dire que la tension du ressort doit être suffisante pour imposer un décalage en bas). • D'après l'expression de , ces équilibres correspondent à : . |
| 1.c. | • Chaque équilibre est stable si et
seulement s'il correspond à une dérivée seconde positive :.• Pour l’équilibre en on obtient : , c’est-à-dire que cet équilibre est stable si (poids insuffisant) et instable sinon. ◊ remarque : pour l’équilibre en on obtient : , c’est-à-dire que cet équilibre est stable si (tension du ressort insuffisante) et instable sinon. • Pour les équilibres en (ou ) on obtient (en simplifiant) : , ce qui est toujours vrai, c'est-à-dire que ces équilibres sont toujours stables s'ils existent. |
| 1.d. | • L’équation du mouvement découle de la
propriété :
; l’étude du mouvement
correspondant à
. • Compte tenu de , l'énergie cinétique est ; l’équation du mouvement est (pour les petites oscillations au voisinage de ) : avec un “coefficient de raideur” : . • Dans ce cas (dérivation par rapport à ) la constante ainsi obtenue n'est pas ce qu'on appelle conventionnellement “raideur” de l’oscillateur. La raideur est en fait intervenant dans l'équation exprimée en fonction du déplacement : . • La période des petites oscillations est donc : . |
| 2.a. | • On obtient : . |
| 2.b. | • La masse
est soumise à une réaction de la tige inclinée, mais cette
force ne travaille pas et peut être omise dans les
raisonnements sur l'énergie. • L'énergie potentielle élastique peut s'écrire : ; l’énergie potentielle de pesanteur est : . • L’énergie mécanique peut s'écrire : . • Les positions d’équilibre correspondent à : ; elles sont donc solution de l'équation : . |
| 2.c. | • Puisque la pente minimale de
est égale à
et que la pente maximale de
est égale à
, la différence entre les deux est strictement croissante
et ne peut prendre une valeur
que pour au plus une valeur de
. Par ailleurs
peut prendre toute valeur réelle et
est bornée, donc la différence peut prendre toute
valeur
pour au moins une valeur de
. • Ceci peut être visualisé à l'aide du graphique suivant, mettant en particulier en évidence la solution dans le cas où .  |
| 2.d. | • L’équilibre est stable si et seulement
s'il correspond à une dérivée seconde positive :(en simplifiant ).• Ceci se ramène à ce qui est toujours vrai (la pesanteur y impose toujours ). |
| 2.e. | • L’équation du mouvement découle de la
propriété :
; l’étude du mouvement
correspondant à
. • Compte tenu de , l'énergie cinétique est ; l’équation du mouvement est (pour les petites oscillations au voisinage de ) : avec un “coefficient de raideur” : . • Dans ce cas (dérivation par rapport à ) la constante ainsi obtenue n'est pas ce qu'on appelle conventionnellement “raideur” de l’oscillateur. La raideur est en fait intervenant dans l'équation exprimée en fonction du déplacement : . • La période des petites oscillations est ainsi : . |
|
|
• En supposant le mouvement limité à l’axe
vertical et en prenant comme origine la position “à vide”
de l’extrémité du ressort (l’ordonnée
est alors égale à l’allongement du ressort), la relation
fondamentale de la dynamique peut s’écrire algébriquement
:
avec
. • Ceci peut s’écrire sous la forme : avec et . La solution particulière montre alors que le mouvement s’effectue “autour” de cette position limite (position d’équilibre). En changeant d’origine pour se ramener à cet équilibre, l’équation devient plus simplement : . • Si le mouvement est pseudopériodique, de la forme : avec . On obtient ainsi : et . • Le décrément logarithmique est (après une pseudo-période, la partie sinusoïdale reprend la même valeur et la variation du logarithme correspond à ). D’après ce qui précède, on obtient donc : . |
| 1. | • L’équation de l’oscillateur considéré est
de la forme :
. Pour un amortissement faible (
), les solutions s'écrivent :
avec :
. • L’énergie mécanique de l’oscillateur est : où est le coefficient d’inertie de l’oscillateur et où est sa “raideur”. Pour un amortissement faible et (à l’ordre le plus bas). On obtient alors : et . • L’énergie perdue par “période” est : .• Le facteur de qualité peut alors s’écrire : . ◊ remarque : on peut aussi exprimer le facteur de qualité comme le rapport pour des oscillations forcées à la résonance, selon l’équation : (en notations complexes) et la solution : donnant (et un déphasage qui importe peu ici) ; pour un amortissement faible, l’amplitude maximum correspond à et donc : ; le facteur de qualité est ainsi : et on retrouve bien si on utilise la notation des régimes transitoires (pour un amortissement faible). |
| 2. | • L’amortissement indiqué correspond à : et donc : . |
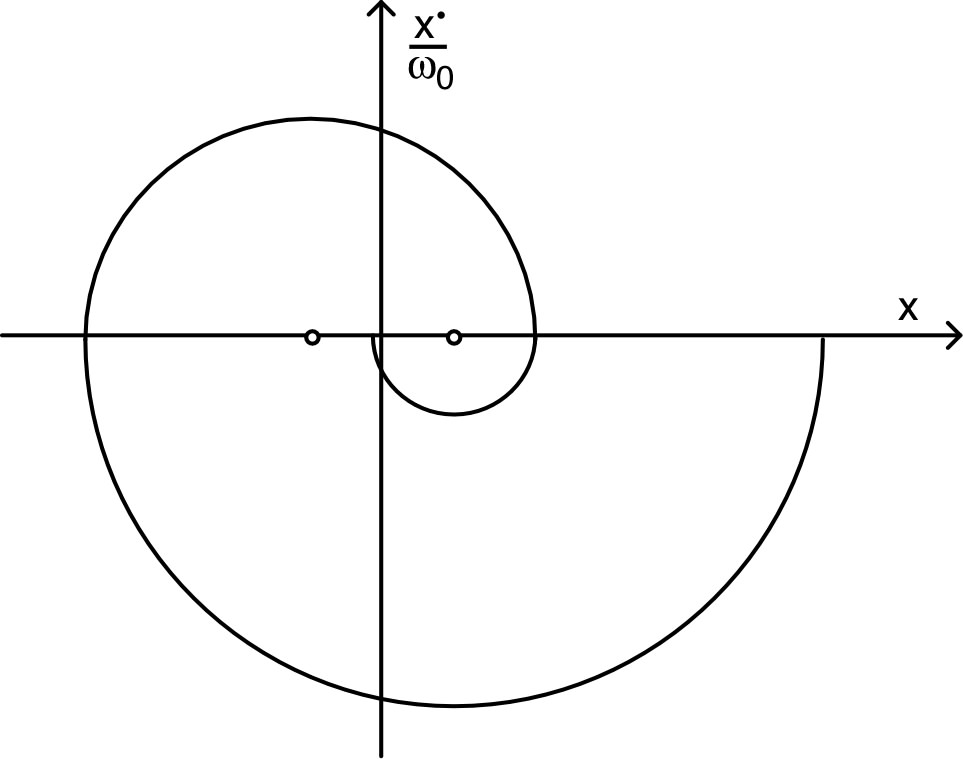
| a. | • La solution peut s’écrire :
et
. • Le diagramme de phase correspond donc à un cercle de rayon . |
| b. | • Pour un départ à vitesse nulle, la
première alternance donne :;La portion correspondante du diagramme de phase est donc un demi-cercle de rayon et de centre . • De même la deuxième alternance donne : ;La portion correspondante du diagramme de phase est donc un demi-cercle de rayon et de centre . • On poursuit ainsi en raccordant les demi-cercles (avec arrêt dès que l’intersection avec l’axe des est entre et ). |
 |
| c. | • L’équation est semblable par rapport à la
variable
, mais un peu moins simple :
avec
. La solution approchée pour les petites
oscillations correspond à l’oscillateur harmonique. La
solution exacte n’est pas facilement explicitable, mais il
suffit ici de la relation entre
et
. • L’intégration de l’équation précédente (ou le théorème de l’énergie mécanique) permet d’écrire : .• On en déduit le diagramme de phase ci-après. ◊ remarque : pour les petites oscillations au voisinage de l’origine, on retrouve le diagramme de phase correspondant à un cercle de rayon . 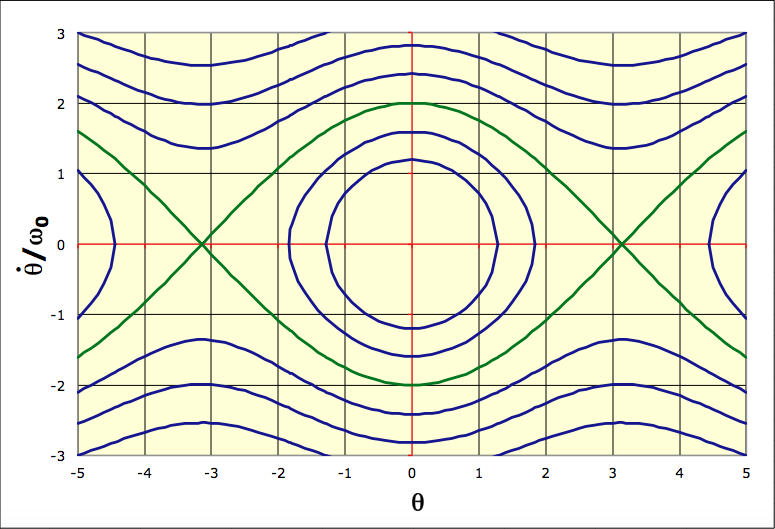 |
|
|
• Si le cadre monte d'une hauteur
le flux magnétique coupé par le fil du haut
est
. Il apparaît une force
électromotrice induite :
et un courant induit :
. ◊ remarque : il apparaît aussi un champ magnétique induit qui s'ajoute au champ magnétique initial, mais cet effet est du second ordre et peut être négligé. • Le courant induit cause une force de Laplace sur le fil du haut ; cette force, selon la loi de Lenz, tend à s'opposer au mouvement qui la provoque : soit algébriquement : . ◊ remarque : il y a aussi des forces de Laplace sur les fils des côtés, mais elles se compensent. • L'équation différentielle du mouvement s’écrit donc : et l'équilibre correspond à : d'après le choix de l'origine ; donc : . • Cette équation est de la forme : où et . Les solutions peu amorties ( ) sont de la forme : où . • Le décrément logarithmique décrit la décroissance de l'amplitude sur une pseudo-période : (amortissement très faible). |
| 1. | • La condition d’équilibre stable en correspond alors à : et (en général, il y a des “raideurs” différentes selon les trois axes). On simplifie alors en choisissant l’origine du repère à la position d’équilibre : . |
| 2.a. | • Dans ces conditions, le point
est soumis à une force “de rappel” :
où
est le vecteur unitaire selon
. • On en déduit les équations : avec ; les solutions peuvent s’écrire sous la forme : , mais ceci correspond a priori à trois oscillations indépendantes : le mouvement est en général non périodique si les sont indépendants ! ◊ remarque : on peut obtenir l’équation du mouvement en dérivant l’énergie mécanique (constante) : ; cette méthode met en évidence le fait que chacune des contributions des différentes coordonnées à est constante (les directions des axes ont été choisies ainsi). |
| 2.b. | • Le cas particulier avec
(noté
) correspond à :
et à une force centrale
:
. • En notant pour simplifier, on en déduit l’équation : avec ; les solutions peuvent s’écrire sous la forme : et les conditions initiales imposent : et . ◊ remarque : la notation avec déphasages est ici moins pratique, car les sont égaux, mais les sont différents. • On obtient donc ici un mouvement plan : dans le plan de et . ◊ remarque : conformément à l’étude générale des mouvements à force centrale, le plan du mouvement est perpendiculaire au moment cinétique . • On peut alors montrer qu’il est toujours possible de choisir la direction des axes de coordonnées de telle façon que : ; ; ; ce qui correspond à une trajectoire elliptique ayant son centre à l’origine (et non pas un foyer, contrairement aux forces en ). ◊ remarque : ce choix d'axes n’est pas contradictoire avec celui envisagé précédemment pour éliminer les termes croisés ; en effet, par symétrie, ces termes s’annulent si les sont égaux (les seules directions privilégiées sont alors celles découlant des conditions initiales). |