OSCILLATIONS MÉCANIQUES LIBRES - corrigé du TP
Oscillations en translation ; mouvement
Étalonnage de la cuve
◊ remarque : peu d'indications sont imposées dans le protocole du
TP, afin d'entraîner l'ingéniosité et les capacités de
communication des étudiants.
• On “remplit” la cuve d'eau : pour les cuves verticales jusqu'un
peu au dessus de l'électrode supérieure ; pour les cuves
horizontales
suffit.
Les cuves verticales sont des éprouvettes graduées : on peut
utiliser les repères en
ou mesurer l'équivalence en .
Pour les cuves horizontales (transparentes), le plus simple est de
fixer préalablement dessous une feuille de papier millimétré.
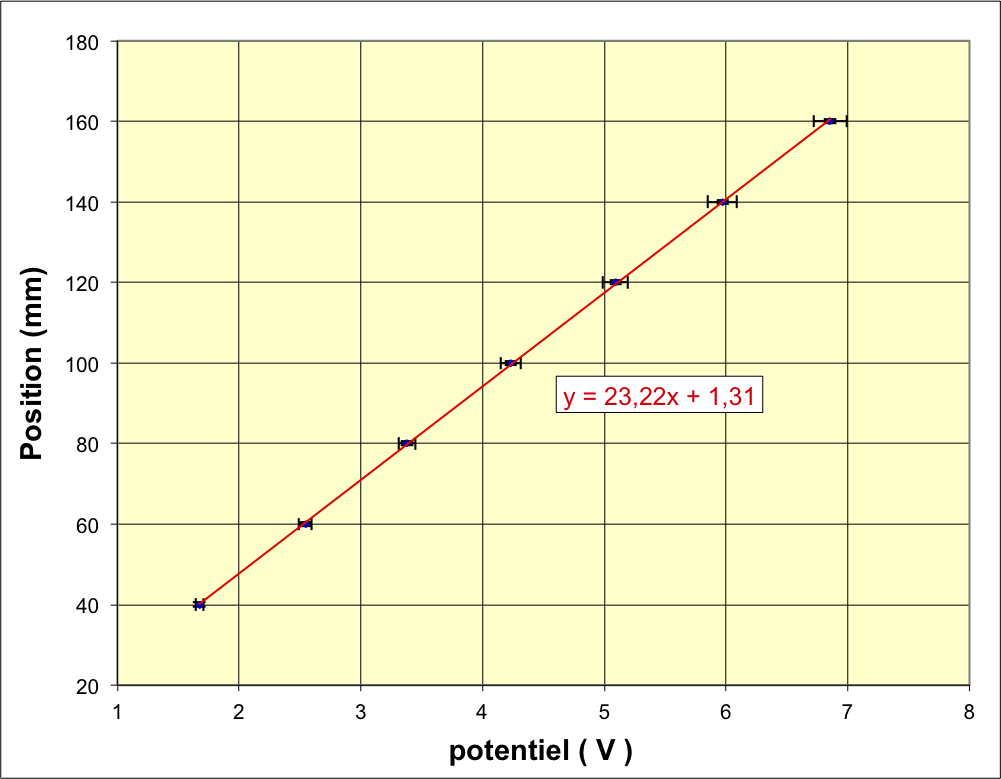
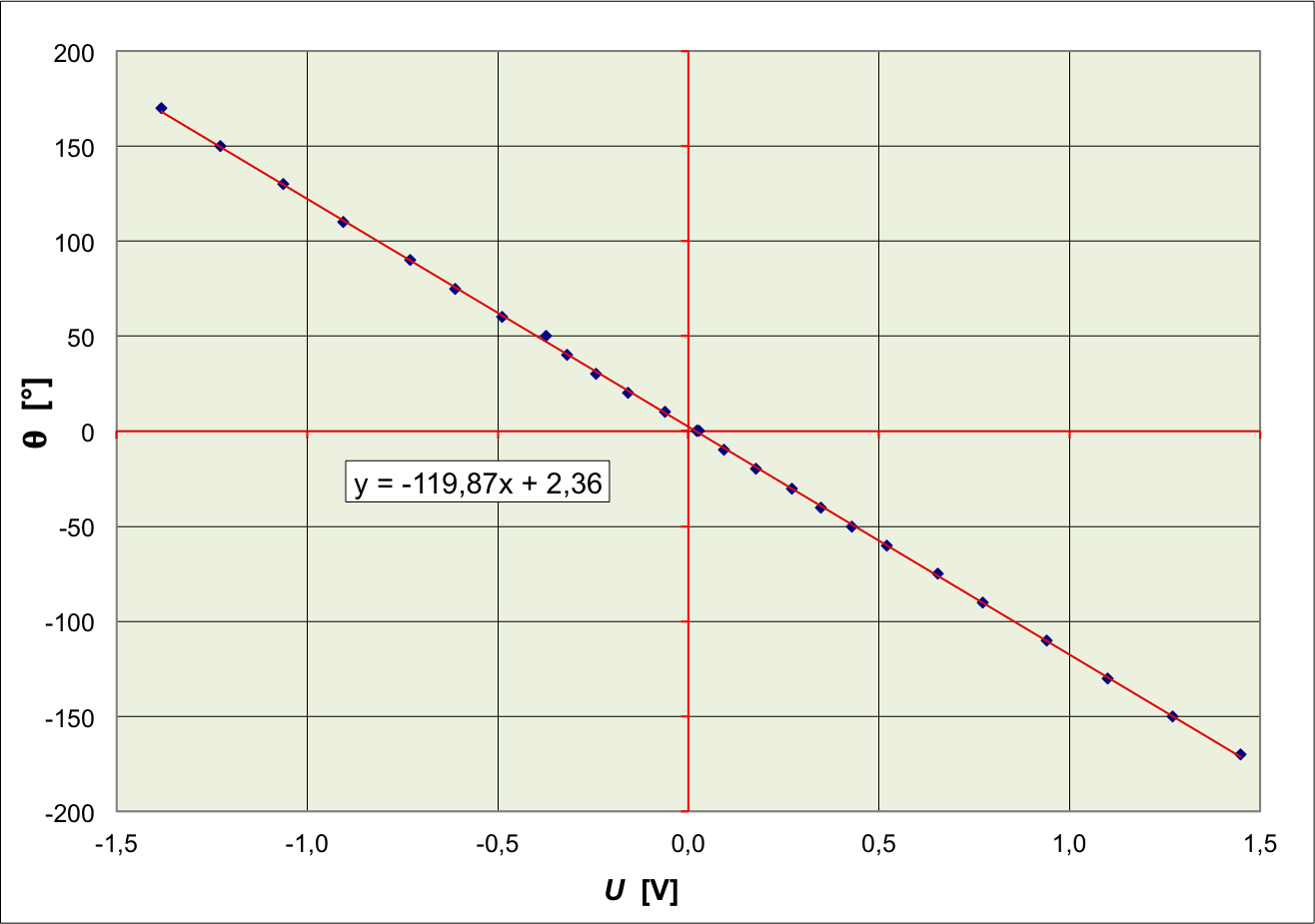
• On mesure alors, en fonction de la position, le potentiel
électrique de l'électrode mobile (faisant partie de l'oscillateur)
par rapport à une électrode servant de référence (logiquement
celle de la cuve au potentiel le plus bas). Les mesures doivent
couvrir toute la zone des mouvements étudiés ensuite.
On obtient généralement une variation très bien décrite par une
modélisation affine (cela simplifie la “traduction” ultérieure des
tensions en positions, mais ce n'est pas indispensable).
Influence de la masse et de la raideur
• Pour de faibles amortissements, on peut considérer .
On peut même se limiter à chronométrer visuellement une dizaine de
(pseudo)périodes pour un oscillateur dépourvu de dispositif
d'enregistrement (il en faut tout de même un nombre suffisant pour
obtenir une précision satisfaisante).
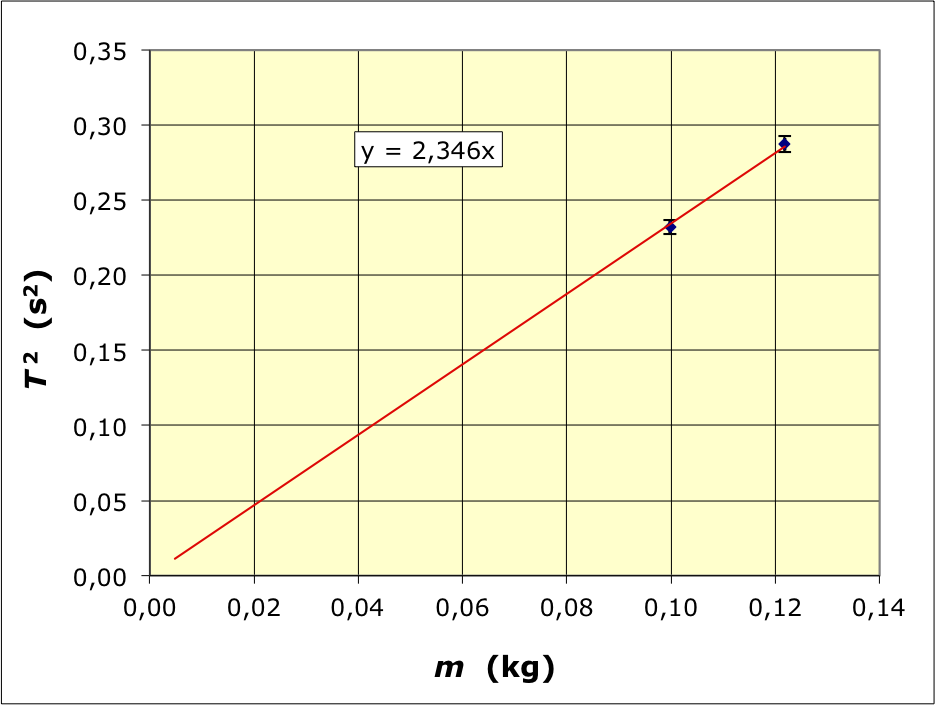
Bien que hélas trop peu nombreuses, les mesures confirment
que
est
proportionnel à
selon
un coefficient
compatible avec
.
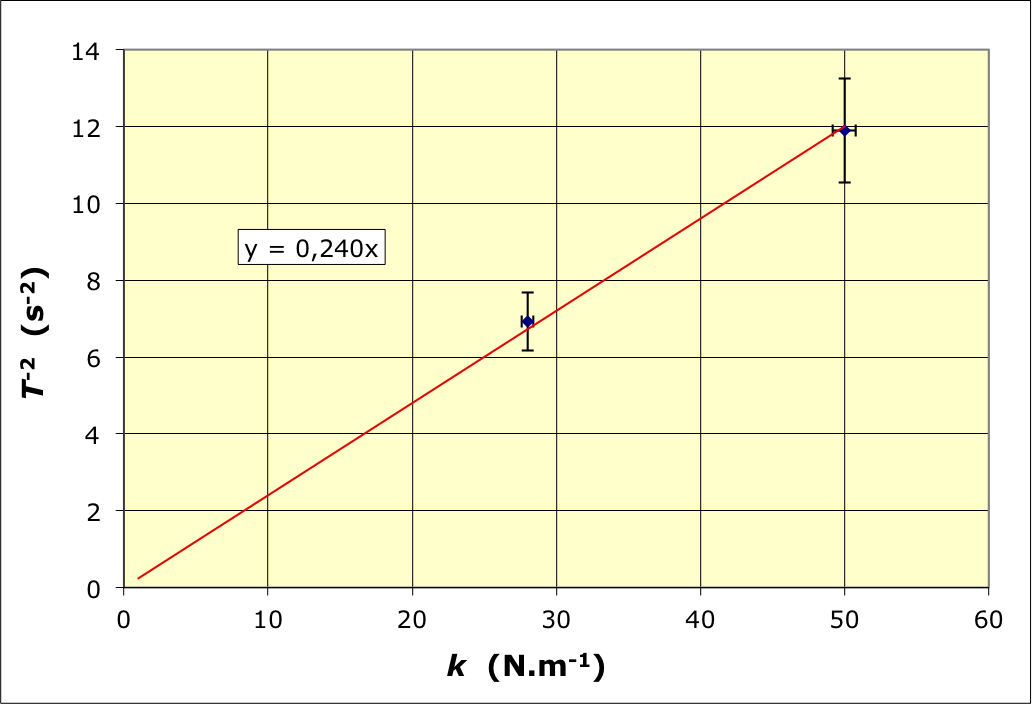
Malgré une précision insuffisante, on vérifie de même que
est proportionnel à
selon
un coefficient
compatible avec
.
Caractéristiques du mouvement
• Le mouvement d'oscillation est amorti par des frottements
visqueux (principalement sur l'électrode de mesure dans l'eau) et
des frottements solides (principalement sur le banc, dont le
coussin d'air n'est pas parfait, mais éventuellement aussi à cause
de certains fils électriques de connexion des parties mobiles).
Bien que l'électrode mobile de mesure cause quelques turbulences
locales dans l'eau, les frottements fluides turbulents sont
normalement négligeables aux vitesses modérées étudiées.
• Les modélisations avec frottement solide seul et/ou frottement
fluide seul peuvent se généraliser pour considére la somme des
deux effets.
Dans le cas (par exemple) du banc horizontal, en notant
la raideur de l'oscillateur, avec un frottement fluide
visqueux (de constante
) et un
frottement solide (de norme
),
l'équation différentielle est de la forme :
avec
;
;
.
• Lors d'une demi oscillation partant de
avec une vitesse initiale nulle, on obtient la solution
:
avec une pulsation
(non modifiée par le frottement solide puisque ce dernier
décale seulement d'une constante).
L'amplitude au début de la seconde demi oscillation est donc
:
(et ainsi de suite pour les oscillations successives).
◊ remarque : l'intervalle d'arrêt limité par
n'est pas modifié par le frottement fluide puisque ce
dernier est nul à l'arrêt.
• Ces expressions sont toutefois inutilement compliquées, car le
frottement fluide est proportionnel à la vitesse donc prédomine
nettement au début des oscillations ; inversement, c'est le
frottement solide qui est prépondérant une fois que ces dernières
ont été très amorties.
Pour confirmer ces modèles, on peut donc raisonnablement se
limiter à modéliser séparément le début et la fin des oscillations
(avec un exemple dont l'amortissement est non négligeable).
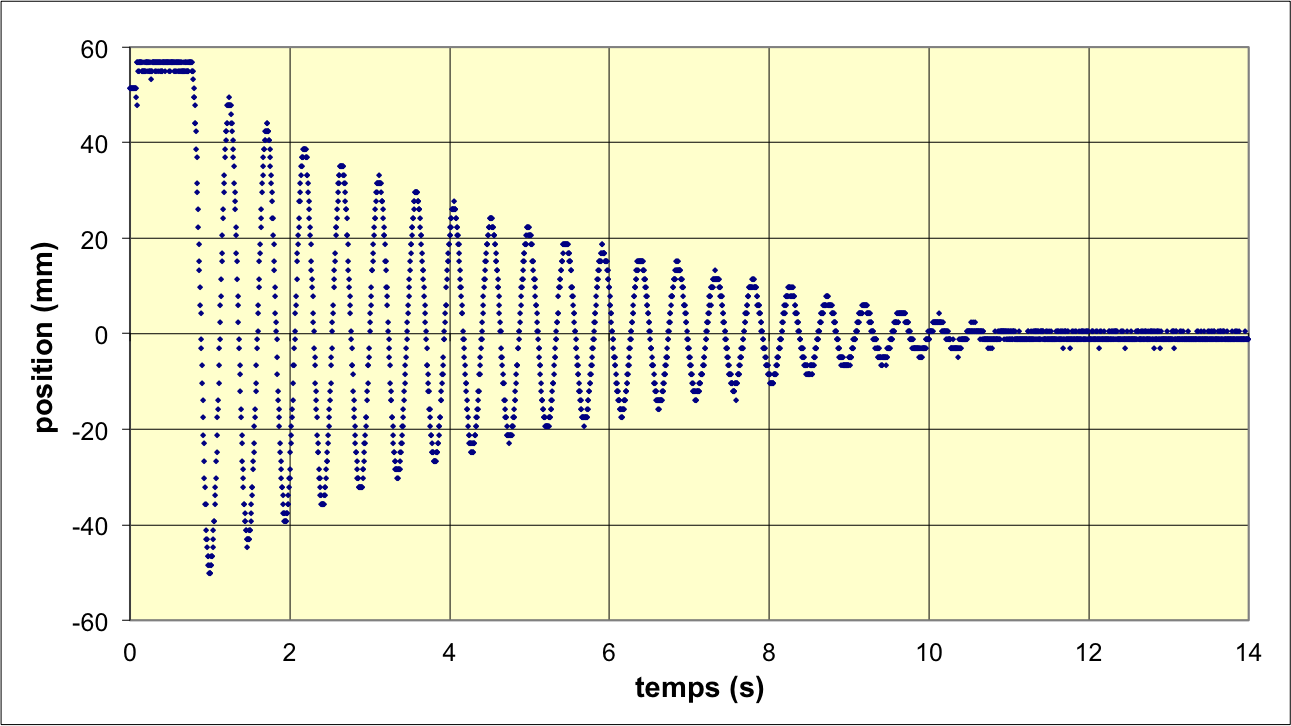
Étude expérimentale de l'amortissement
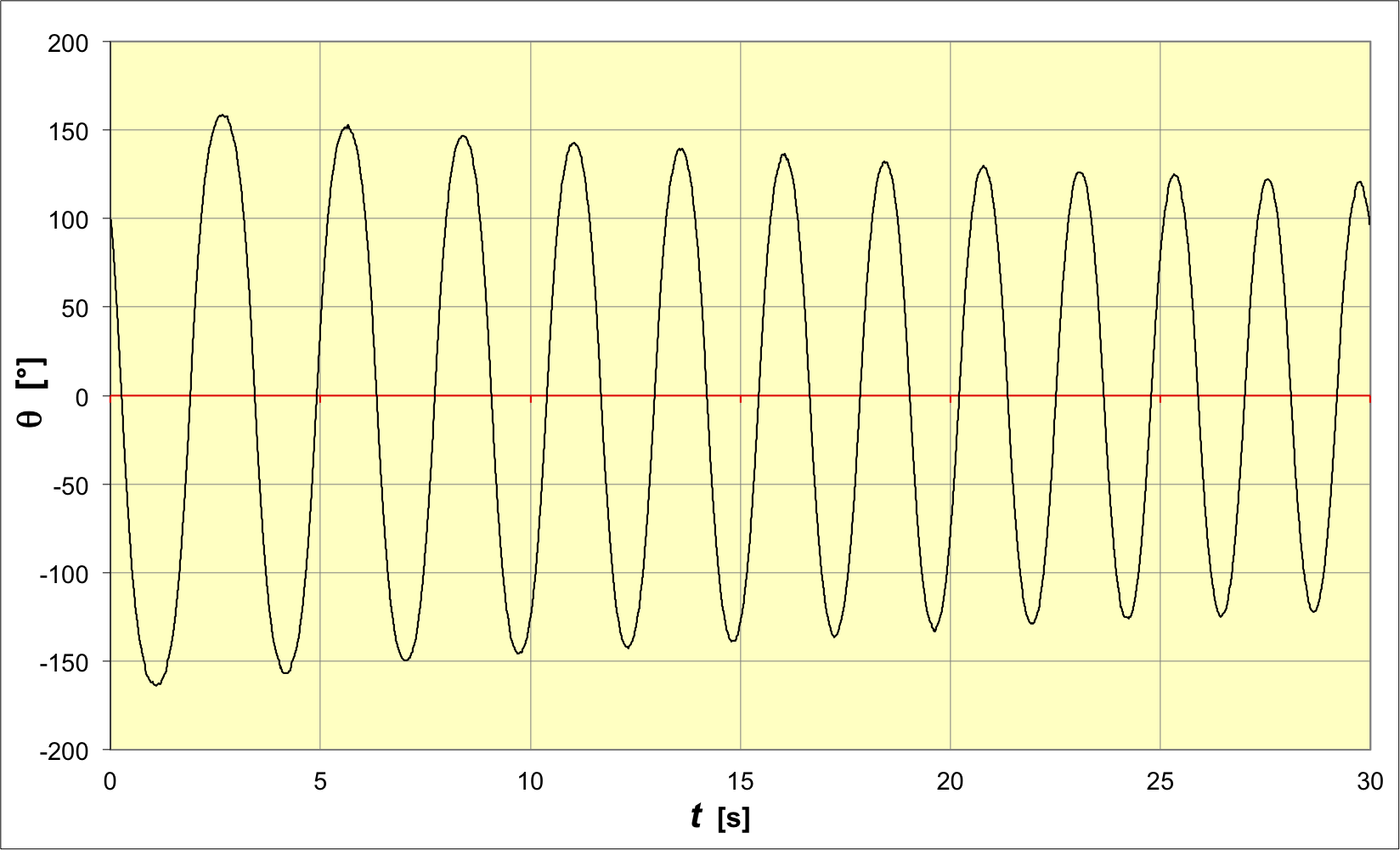
• Le mouvement peut être engistré avec un oscilloscope à mémoire,
par l'intermédiaire du potentiel de l'électrode mobile.
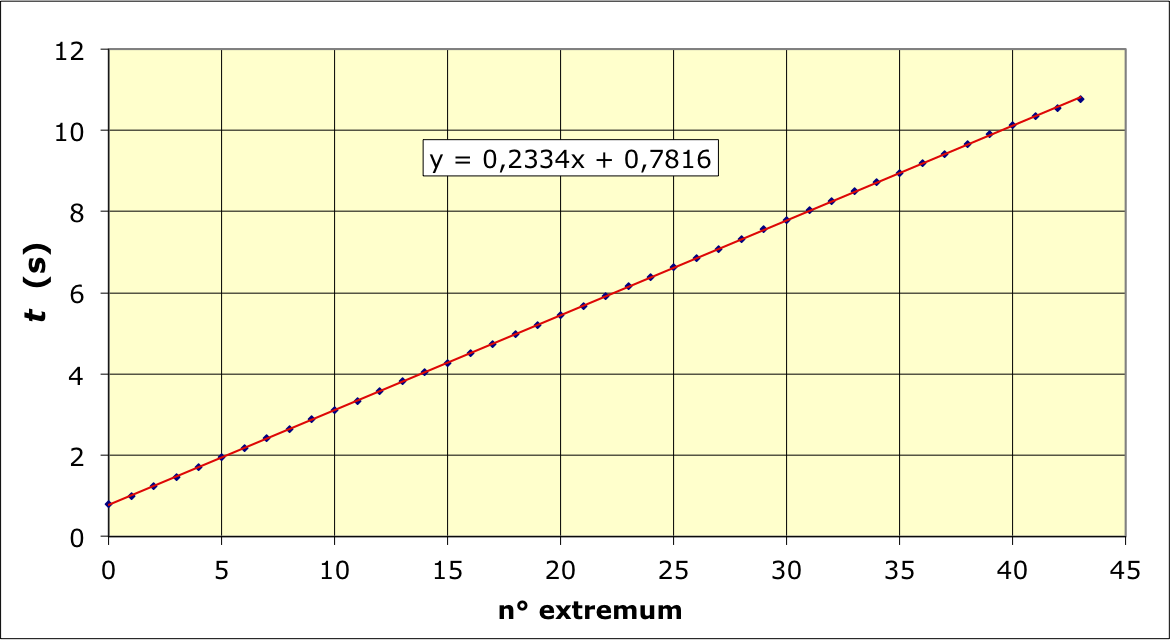
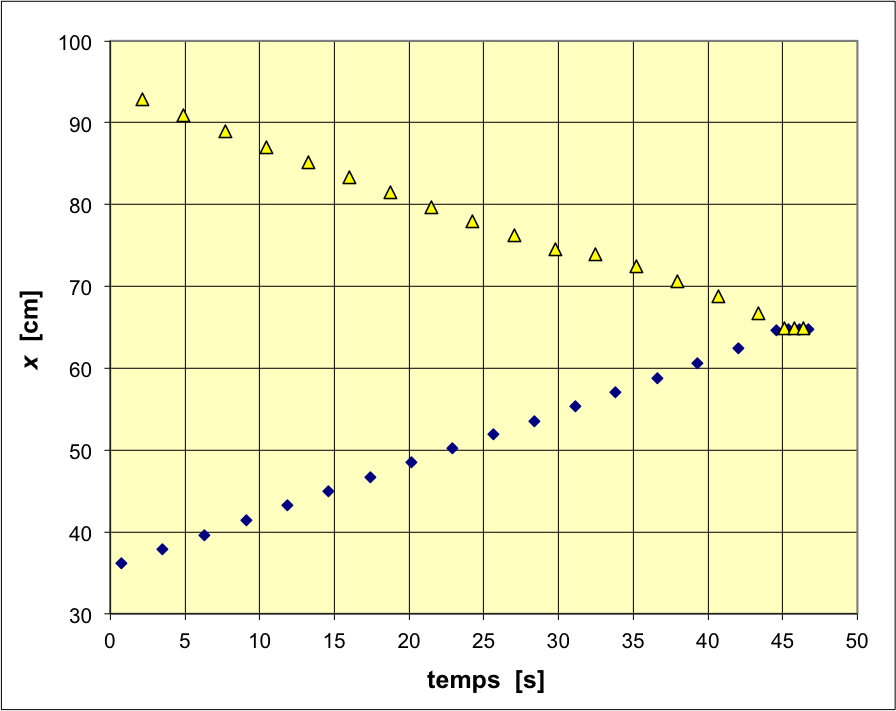
• Une première approche peut consister à tester la pseudo-période
en comparant les instants des extremums successifs
On constate une évolution affine, caractéristique d'une
pseudo-période constante
.
Pour cet exemple, la période propre est
; l'écart entre les deux valeurs est trop faible pour
pouvoir en déduire α d'après l'expression théorique du modèle (les
deux valeurs sont compatibles d'après les incertitudes).
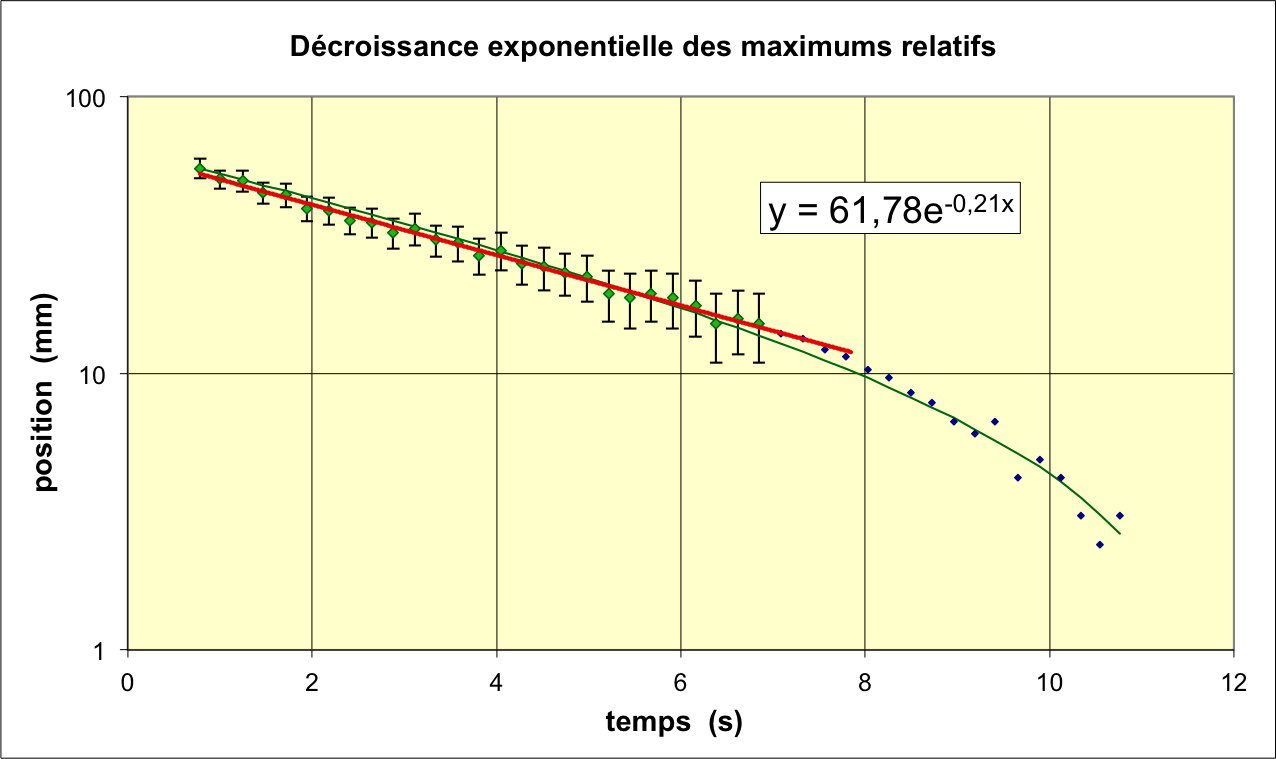
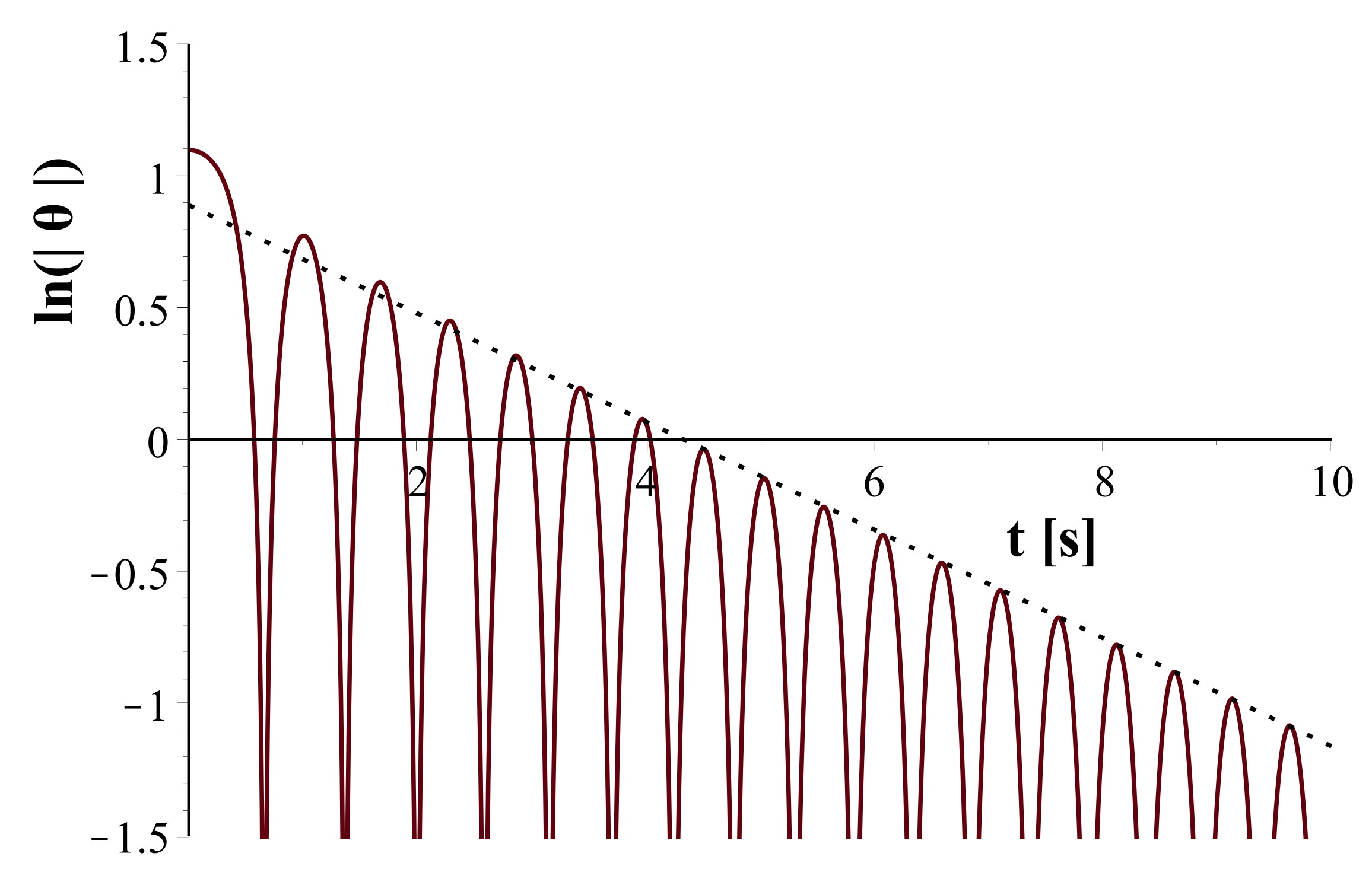
• Pour l'étude directe de l'amortissement expérimental précédent,
on est tenté à première vue d'interpréter avec une décroissance de
type exponentiel ; une observation plus attentive suggère
toutefois que l'atténuation finale est pour celà un peu “brusque”.
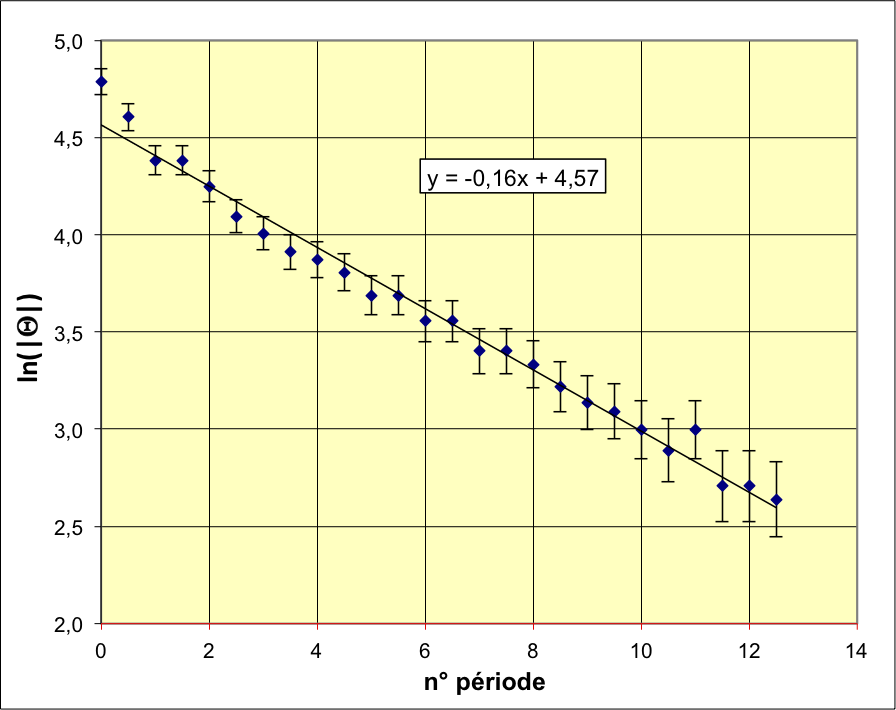
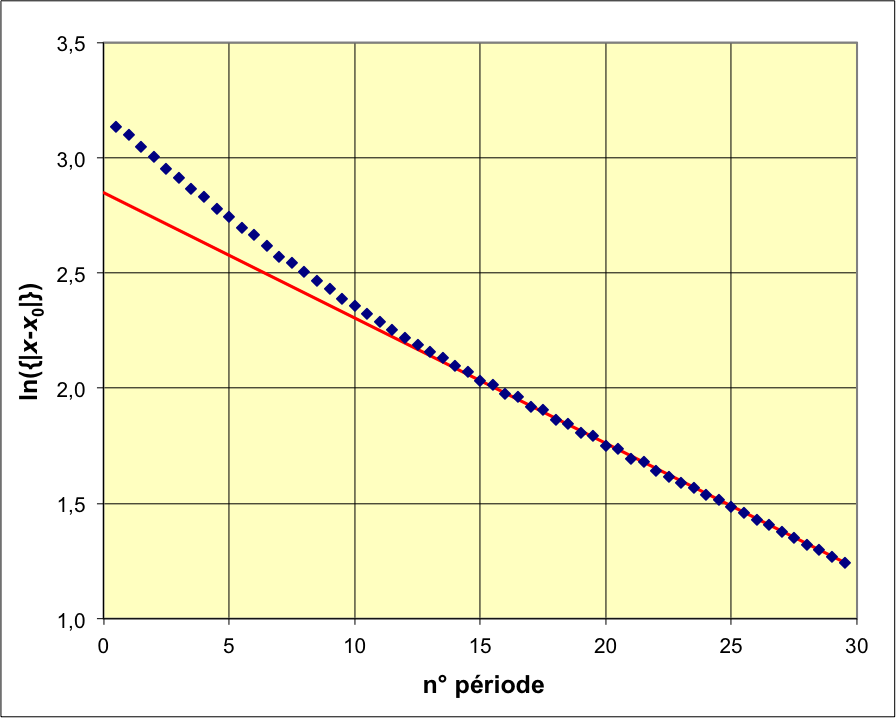
• La représentation graphique de la succession des extremums
relatifs, en échelle logarithmique, montre que tout le début de la
courbe est bien modélisé par une décroissance exponentielle ; la
fin est par contre effectivement incompatible.
On obtient ainsi
; cela est effectivement très inférieur à
(c'est ce qui permet d'observer une vingtaine de
pseudo-périodes).
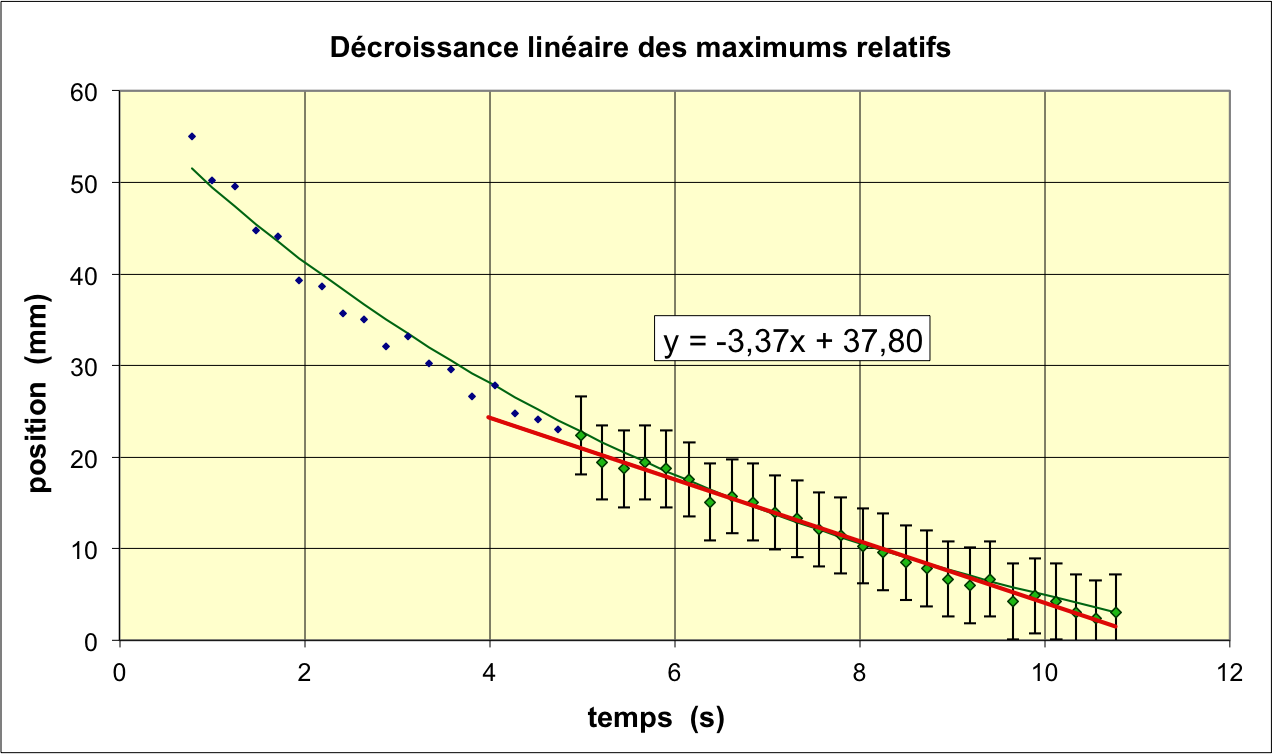
• Pour la fin de l'amortissement au contraire, une représentation
en échelle linéaire est adaptée ; elle montre que la modélisation
par un frottement solide est tout à fait satisfaisante.
On obtient un coefficient de décroissance
correspondant à
.
◊ remarque : à titre de comparaison, pour une amplitude
d'oscillation
le
frottement visqueux passe par des maximums
;
avec ici
cela
donne au début
; bien que cela soit un maximum et non une moyenne, il faut
que l'amplitude soit divisée par trois pour que le frottement
solide devienne prépondérant.
◊ remarque : la méthode consistant à simplifier les calculs en
séparant le domaine d'étude en zones de prépondérance est assez
générale et utile dans de nombreuses parties des sciences
physiques.
Énergie mécanique
• On étudie un cas d'oscillateur sur banc à coussin d'air avec
frottement visqueux (très faible). La masse du palet mobile
est
mais on
se demande s'il ne faut pas prendre en compte une partie de la
masse des ressorts (participant forcément au mouvement).
Puisque dans ce cas
en excellente approximation, on mesure alors
et la
raideur
; on en déduit une masse oscillante
tout à fait compatible, montrant que la contribution des
ressorts à la masse est de toute façon inférieure aux
incertitudes.
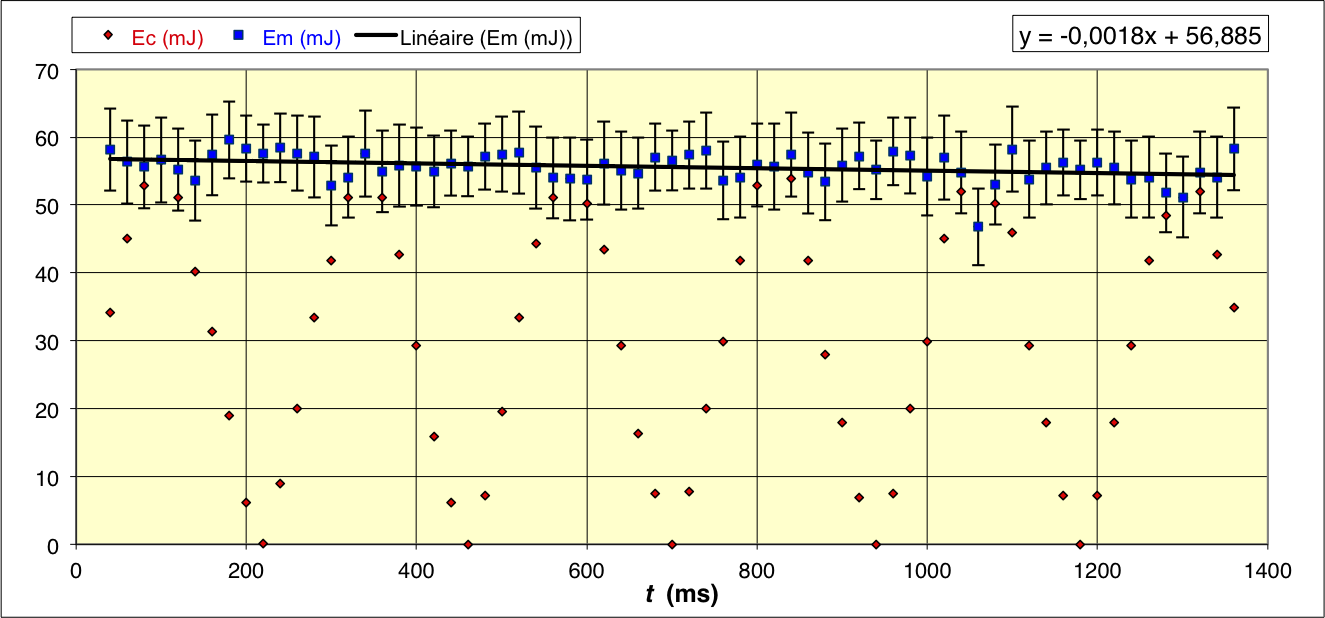
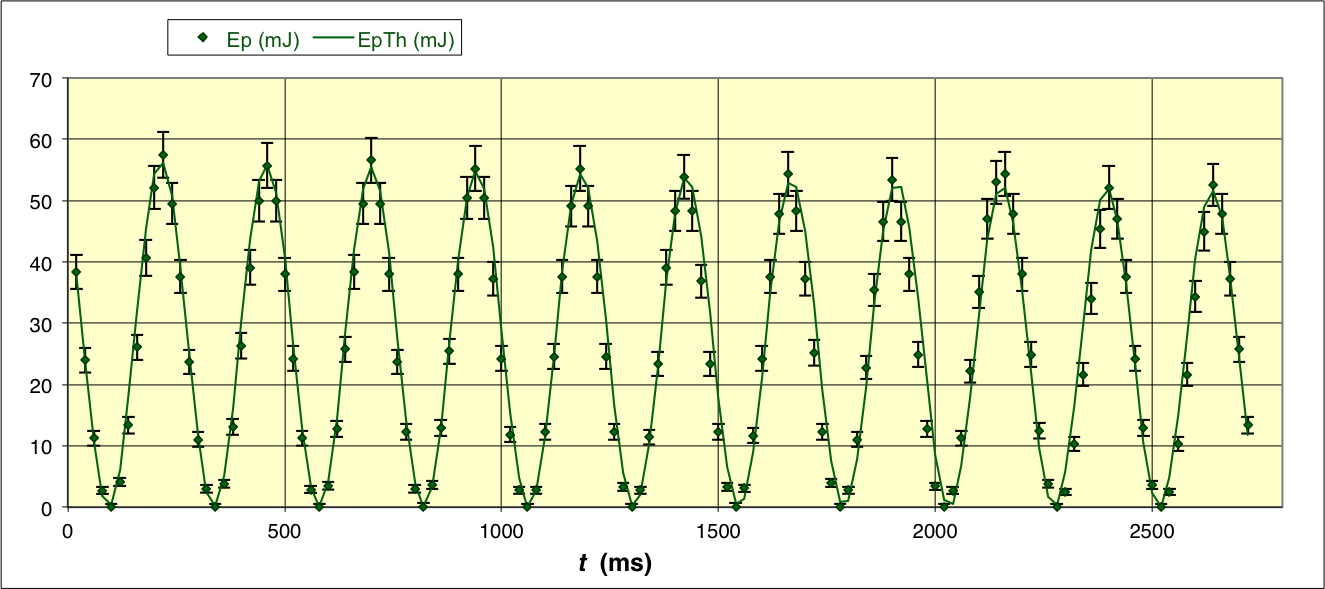
• En utilisant le modèle associé
on décrit
l'énergie potentielle
et l'énergie cinétique
ainsi que l'énergie mécanique correspondante.
On peut alors ajuster les paramètres du modèle pour décrire au
mieux les mesures.
On constate que la modélisation est satisfaisante sur le détail de
cinq périodes ; l'amortissement est en fait assez faible pour
qu'une approximation affine de l'exponentielle soit suffisante.
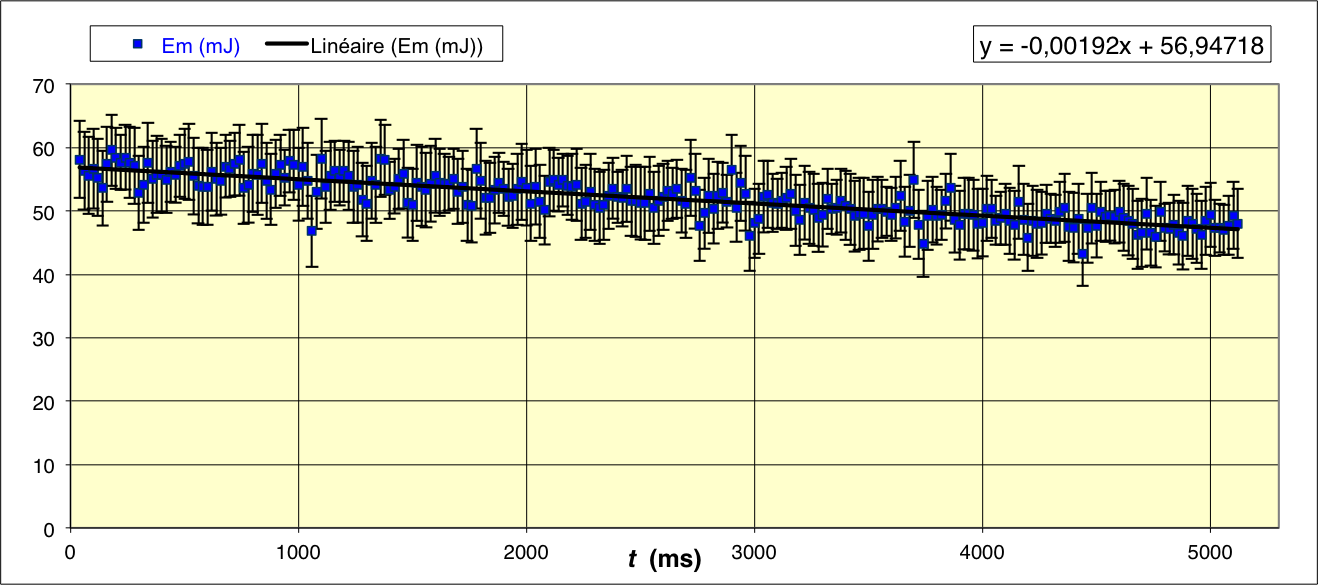
L'étude de la décroissance de
sur
l'ensemble des cinq secondes mesurées confirme la conclusion
précédente ; on obtient ainsi
.
◊ remarque : cet amortissement est plus important que celui de
l'exemple précédent ; il aurait pu être intéressant de mesurer sur
une plus grande durée pour constater le caractère exponentiel,
mais le dispositif d'enregistrement utilisé (dans les années
1995...) imposait un compromis entre la durée d'ensemble et le
détail des variations sur chaque période.
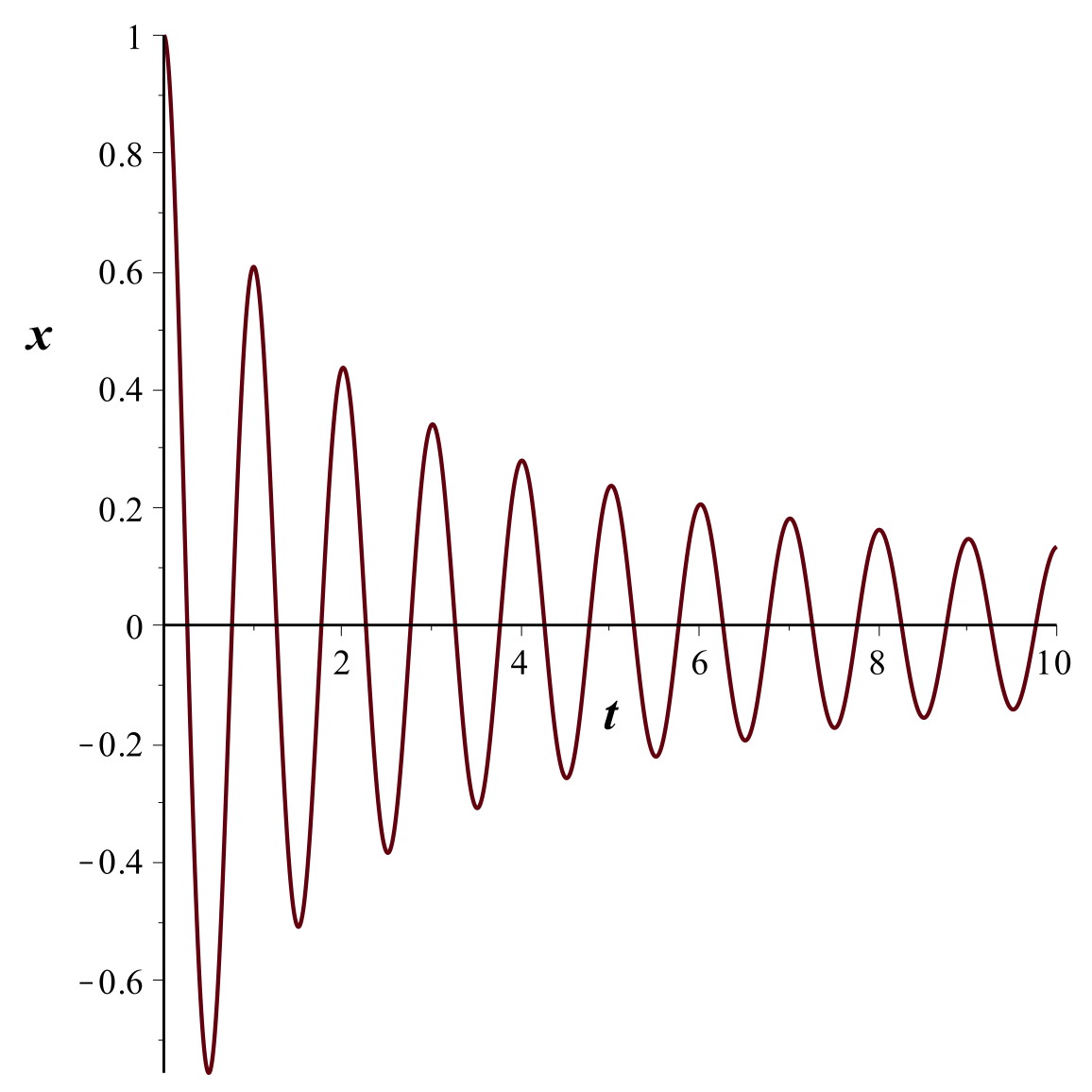
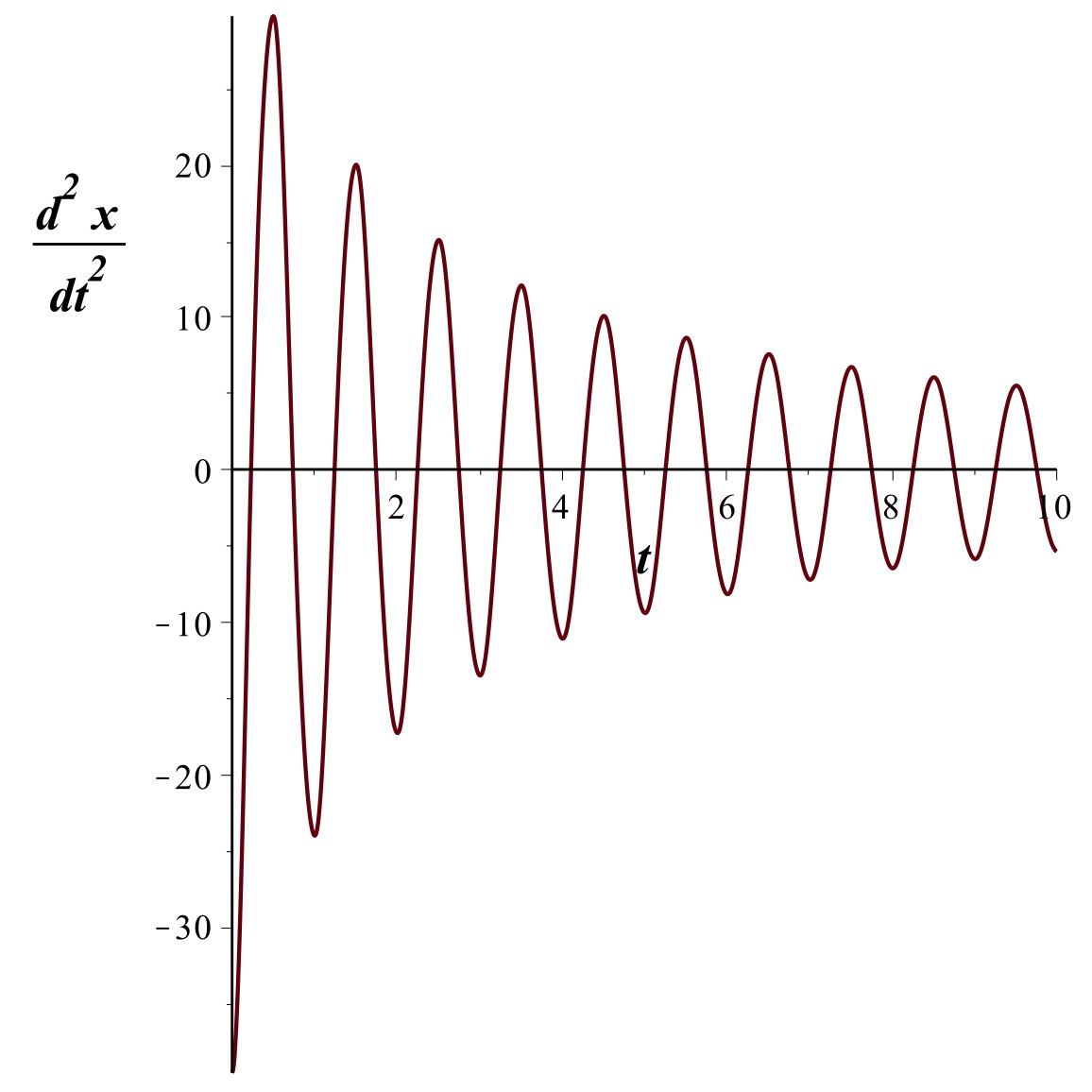
Amortissement turbulent
• Quelques essais ont été tentés, en fixant une petite “palette”
de carton sur l'électrode de mesure afin d'augmenter les
turbulences ; hélas sans aboutir à des données expérimentales
convaincantes. Pour montrer tout de même une méthode possible, on
choisit ici de générer informatiquement une série de points par
intégration numérique de l'équation.
On constate au début un amortissement plus rapide que pour un
frottement visqueux (turbulences plus importantes quand la vitesse
est plus grande).
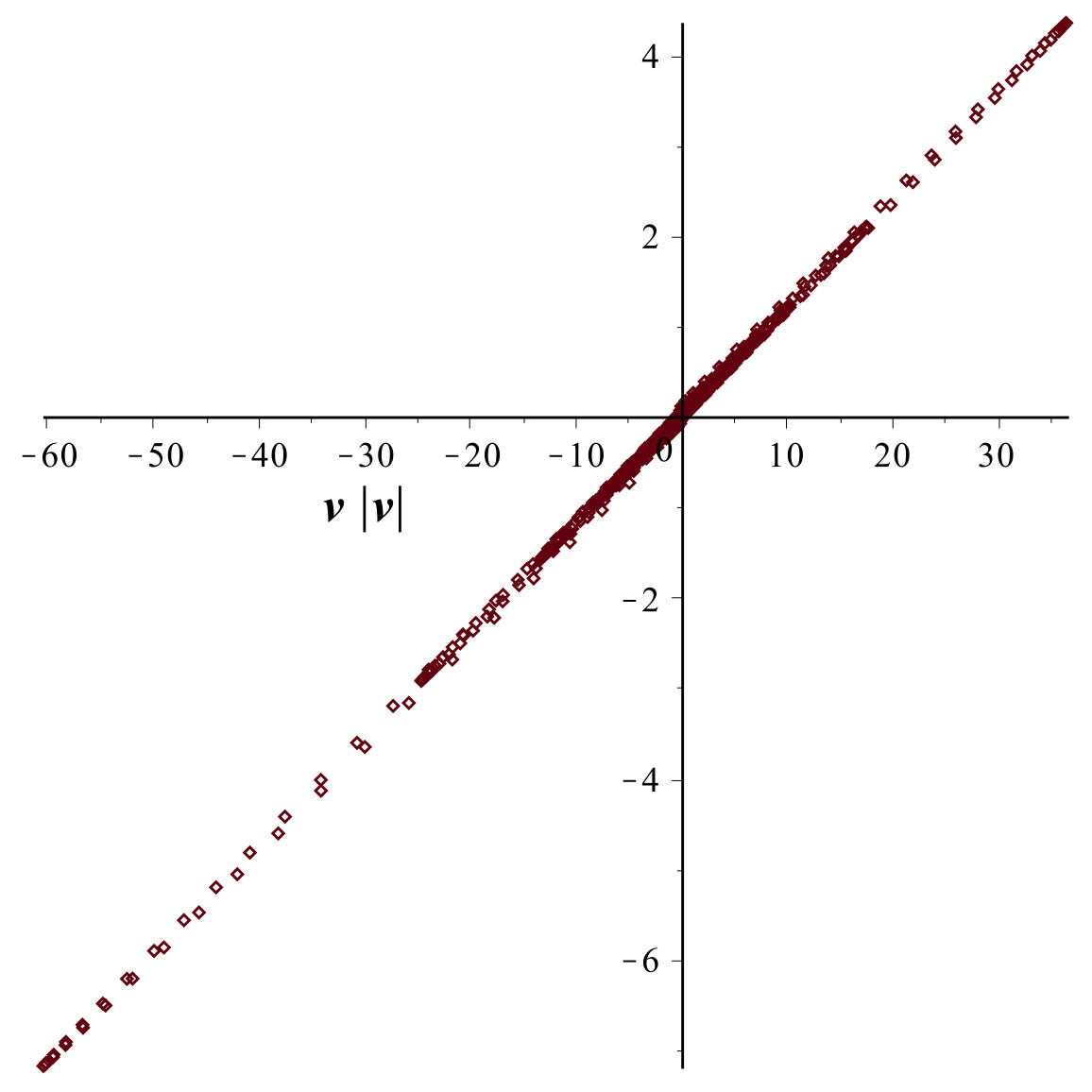
• Pour tester une modélisation de frottement en
(ou plus
généralement en
), on ne
peut pas trouver de solution littérale théorique car l'équation
différentielle est non-linéaire.
On peut par contre, pour chaque point mesuré
,
ajuster un polynôme (de degré 3 ou 4 ) sur un groupe avec trois
points avant et trois après ; en dérivant ce dernier, on en déduit
des estimations locales de la dérivée
et
de la dérivée seconde
.
◊ remarque : cela nécessite au moins
points
par période (pour la précision des ajustements).
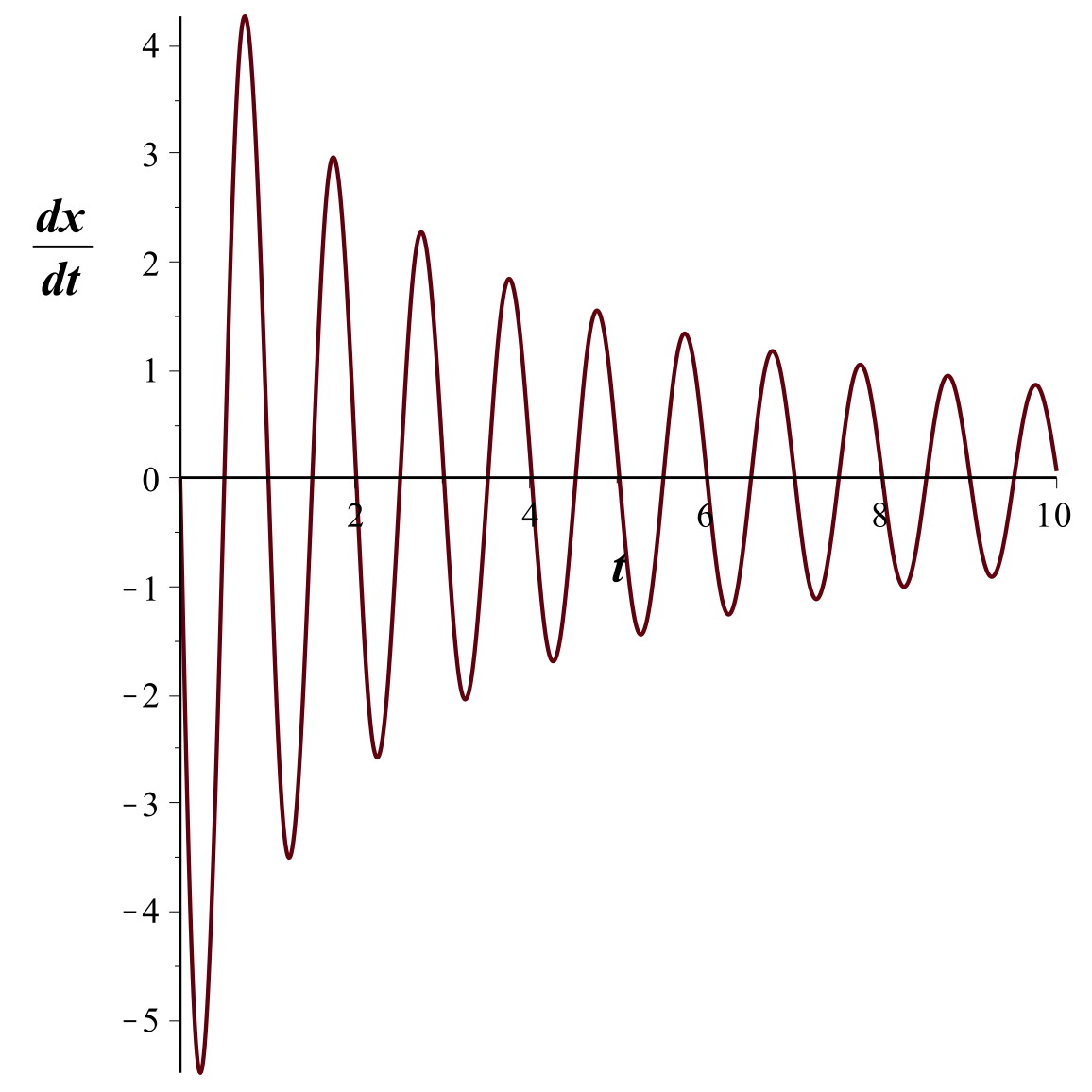
• On peut ensuite les reporter dans l'équation différentielle et
ajuster globalement les coefficients du modèle pour que celle-ci
soit vérifiée au mieux.
Une méthode simple consiste toutefois à commencer par calculer
et
d'après les
points calculés (pour tester la méthode il faut procéder “comme
si” il s'agissait de points mesurés). Les passages par
donnent
(ici unités arbitraires) d'où
(unités arbitraires) tout à fait compatible avec la valeur
utilisée dans la génération des points (l'amortissement a
donc dans ce cas une influence négligeable).
• On peut en déduire
afin de comparer au terme de frottement présupposé
.
Le fait d'obtenir une proportionnalité confirme l'expression
proposée pour le frottement ; l'ajustement d'une droite passant
par l'origine donne un coefficient
(unités arbitraires) tout à fait en accord avec la valeur
utilisée pour la génération des points.
◊ remarque : si on obtient une courbe régulière mais non linéaire,
on peut tester une expression en
avec un
diagramme logarithmique.
Pendule pesant
Grandes oscillations
• Le moment du poids peut s'écrire
en notant
la masse,
la
distance entre le centre d'inertie et l'axe de rotation,
l'angle par
rapport à la verticale.
L'étude du moment d'intertie du pendule en fonction de la
répartition des masses n'a pas été envisagée ici. Étant donné que
le pendule est principalement constitué d'une masse
(de
dimension modérée en comparaison de sa taille) fixée sur une tige
(de masse faible en comparaison) à une longueur
de
l'axe de rotation, on peut noter
le moment d'inertie.
En négligeant les l'amortissement en première approximation,
l'équation différentielle est ainsi de la forme :
avec
. On ne cherchera pas à préciser ici.
• Dans la limite des petites oscillations
donne la solution
pour
un départ immobile à la position
.
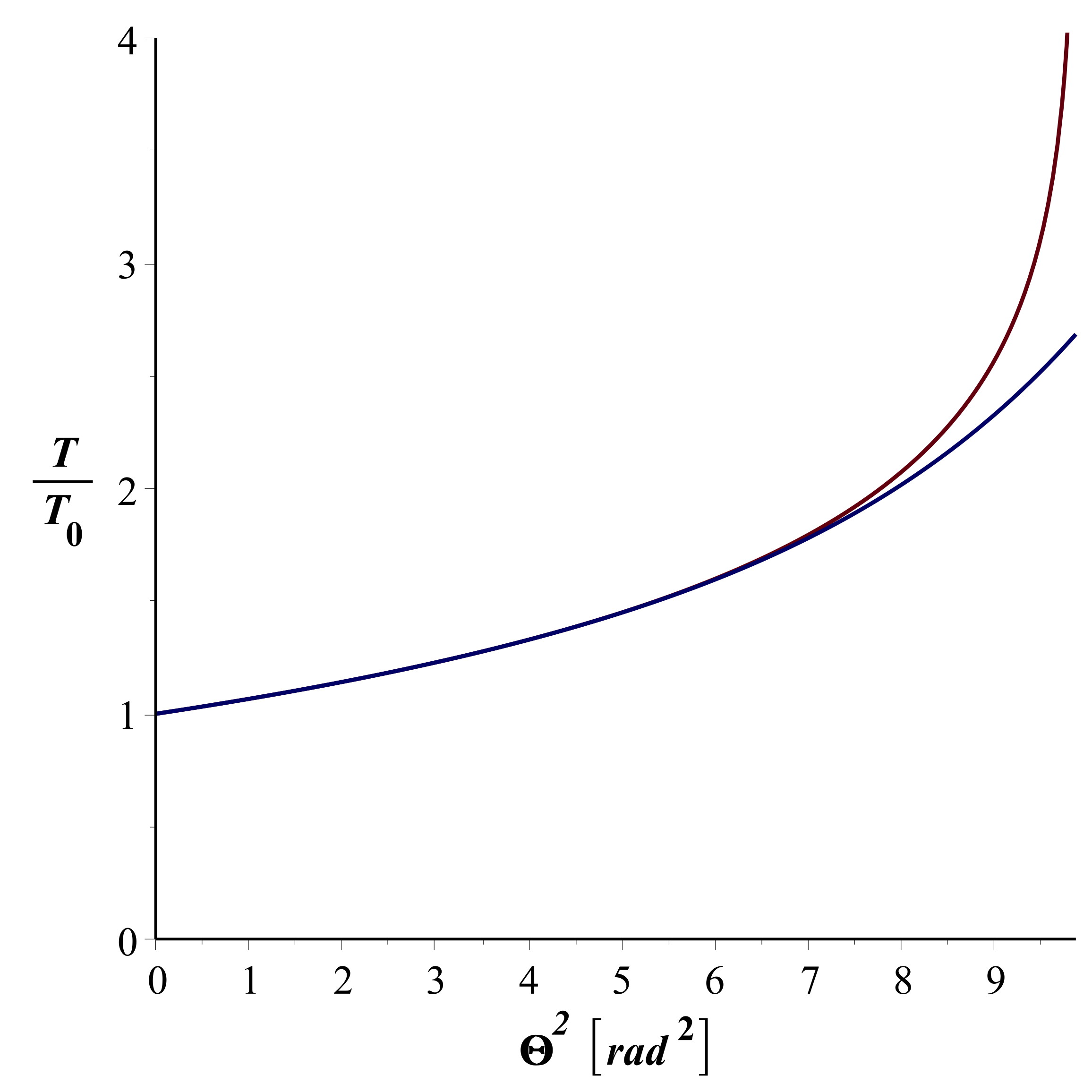
• Pour les grandes oscillations, une première intégration donne
:
. Par séparation des variables, on obtient ainsi :
.
On peut intégrer numériquement ou utiliser un développement
limité, mais avec un logiciel de calcul formel car un calcul à
l'ordre 7 en
(la
fonction est paire) est nécessaire :
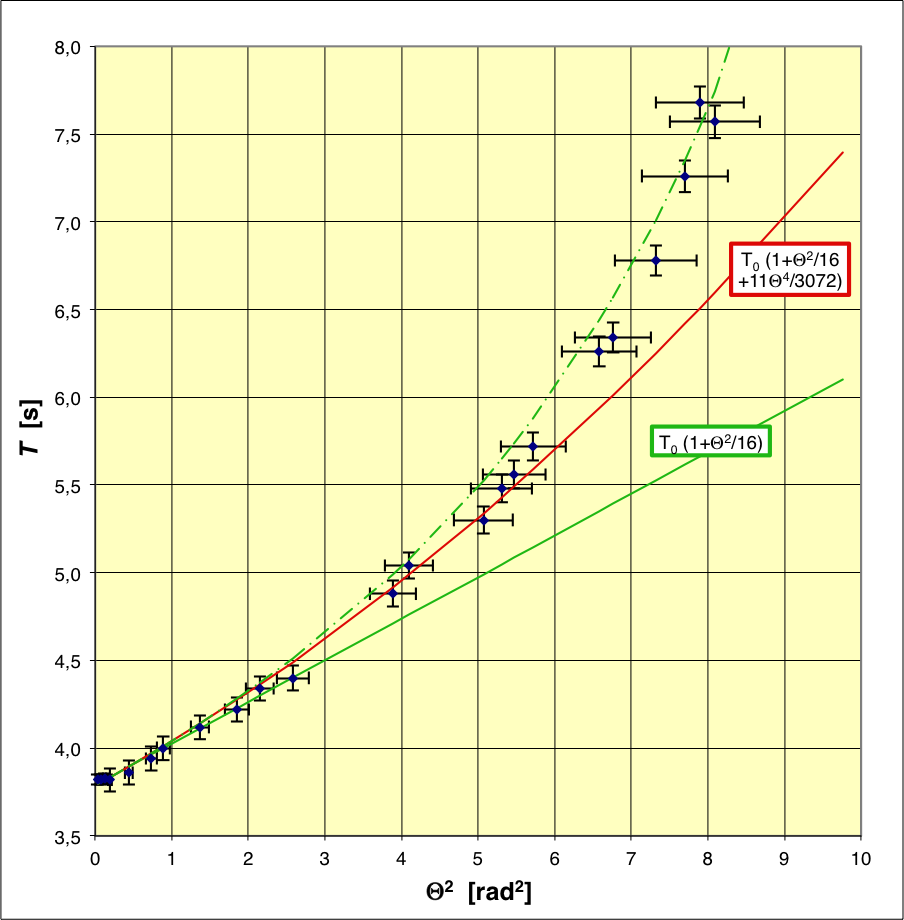
• Pour les mesures, une approche simple consiste à placer un écran
derrière le pendule et à y projeter l'image d'un rapporteur (le
rétro-projecteur est adapté).
On lâche le pendule initialement immobile à une amplitude
; on
mesure une période et on repère la position
de
remontée (il y a un inévitable léger amortissement). Pour une
meilleure précision, il est préférable de mesurer plusieurs fois
et de calculer la moyenne. On utilise ensuite
.
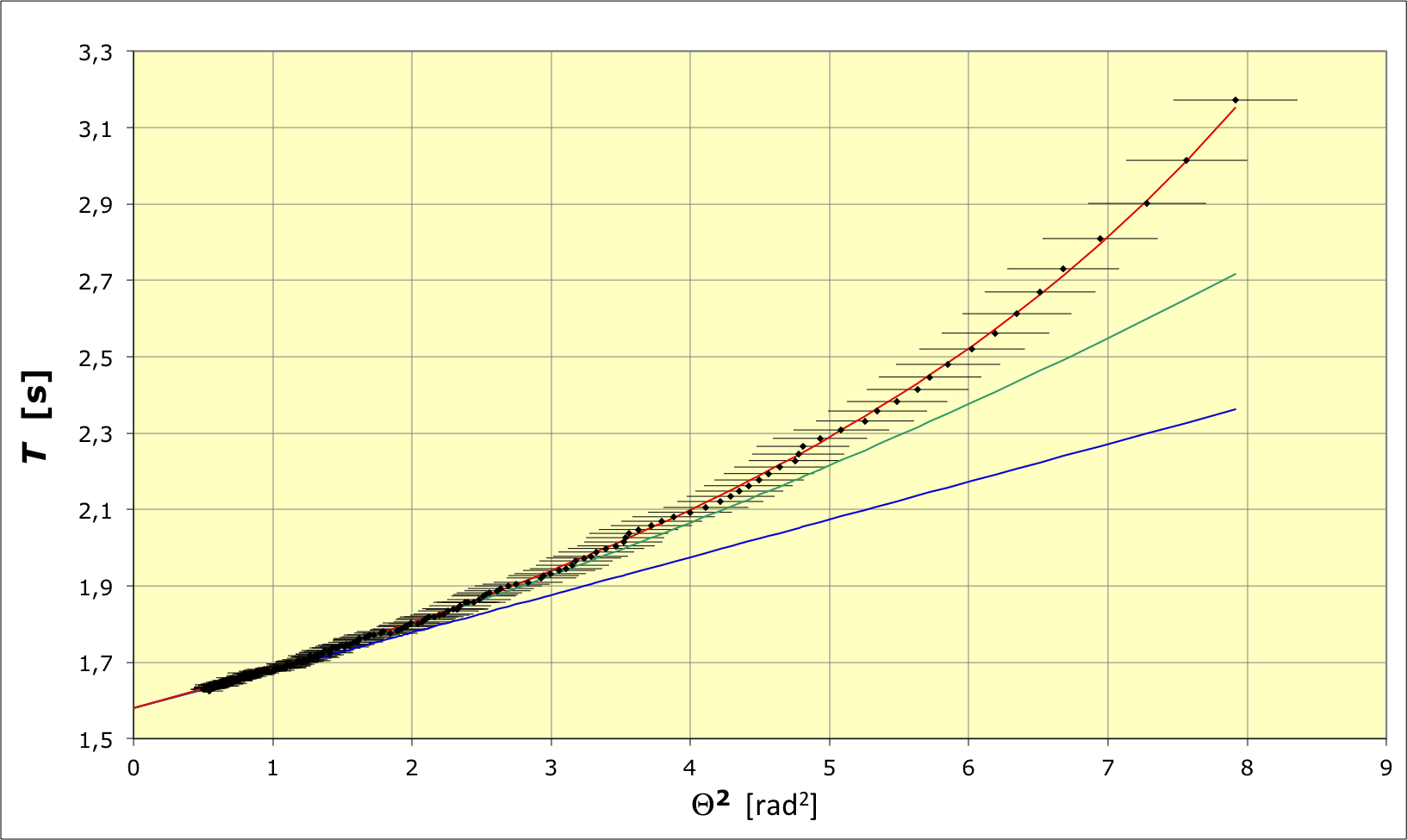
Les mesures sont bien modélisées par le développement limité à
l'ordre 7 en
. Le
développement à l'ordre 1 en
est
toutefois correct jusqu'à
; celui à l'ordre 2 en
est
correct jusqu'à
.
• Une approche plus élaborée a été possible lorsqu'on a trouvé un
modèle de résistance réglable par un bouton tournant, avec un très
faible frottement. En fixant la résistance sur le pendule et en
bloquant le bouton avec un support, on peut inclure la résistance
dans un circuit électrique avec pont diviseur de tension et
mesurer ainsi un grand nombre d'oscillations avec un grand nombre
de points.
À l'aide du dispositif avec rapporteur, on étalonne le circuit de
mesure.
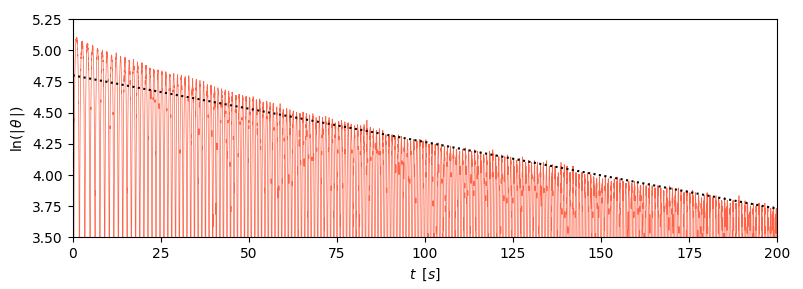
Avec un oscilloscope à mémoire, on enregistre ensuite 50000 points
sur
. Les mesures étant très rapprochées, on peut ainsi éliminer la
plupart des parasites en lissant sur 7 points (3 avant ; 3 après).
On obtient une courbe d'évolution sur plus de 120 périodes.
• Pour chaque (pseudo)-période on calcule la durée et l'amplitude
; ceci donne un graphique analogue à celui obtenu par la méthode
simple, mais plus complet ; les conclusions sont les mêmes.
Amortissement
• Pour étudier l'amortissement des oscillations, on peut utiliser
la méthode simple déjà évoquée, consistant à repérer les maximums
successifs avec une projection d'un rapporteur (les étudiants
n'ont pas mesuré la période).
La décroissance affine du logarithme de l'amplitude justifie une
modélisation par un amortissement fluide visqueux, à part
peut-être tout au début.
Faute d'informations plus précises sur le mouvement, on ne peut
pas savoir si cela est dû au fait que les vitesses sont plus
grandes au début, d'où une contribution possible de frottement
turbulent, ou bien au fait que pour les grandes amplitudes les
caractéristiques du mouvement diffèrent de celles du pendule
élastique.
• Un autre groupe a utilisé un dispositif à capteur infrarouge
pour mesurer le déplacement horizontal de l'extrémité du pendule,
mais ils n'ont pas mesuré avec précision la position du réflecteur
(
). Or, cela intervient pour calculer l'amplitude angulaire ;
heureusement, la disposition du faisceau limite aussi l'amplitude
(maximum
) donc
l'approximation
est raisonnable (écart
comparable aux incertitudes). Ils ont raisonné avec
.
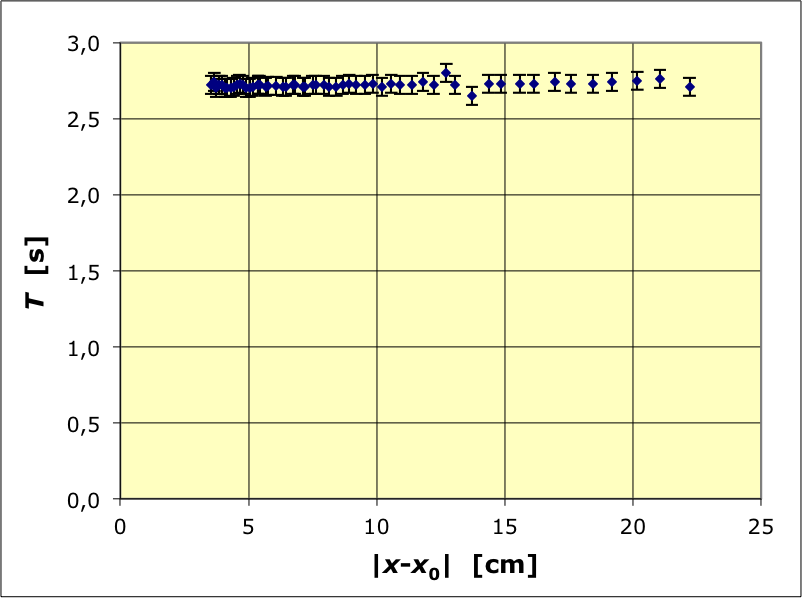
Ils ont par contre mesuré la (pseudo)-période et vérifié que, dans
ces conditions limitées, elle ne dépend pas de l'amplitude
(l'éventuelle augmentation aux plus grandes amplitudes est
comparable aux incertitudes).
• La décroissance du logarithme de l'amplitude n'est par contre
pas compatible avec un frottement fluide visqueux. En pratique,
les étudiants avaient augmenté le frottement sur l'air en fixant
sur le pendule une plaquette de carton ; cela provoque des
turbulences pour les plus grandes vitesses au début des mesures.
Cet effet ne peut pas être étudié plus précisément car les
étudiants n'ont pas conservé l'intégralité des mesures en fonction
du temps.
• Ce groupe a par contre aussi testé les oscillations avec un
frottement solide : le support du pendule comporte un dispositif à
vis permettant cela à l'aide d'un serrage à vis.
Pour des amplitudes relativement faibles (
) on vérifie la décroissance affine caractéristique du frottement
solide comme pour un oscillateur à ressorts.
• Pour ce qui concerne l'éventualité d'un frottement turbulent, on
peut penser à utiliser les données enregistrées par le groupe qui
a étudié les grandes amplitudes. On y voit effectivement une
variation non affine du logarithme aux grandes amplitudes. Cet
effet reste toutefois modéré car ce groupe ne recherchait pas à
augmenter le frottement fluide, donc n'a pas ajouté de plaquette
de carton sur l'axe du pendule.
Or l'équation du pendule pesant n'est pas linéaire ; une
simulation par intégration numérique montre que pour un frottement
visqueux cela perturbe la variation affine du logarithme aux
grandes amplitudes. L'éventuel effet turbulent n'est ainsi nulle
part assez prépondérant pour être clairement étudié (ici, il n'y a
pas besoin de beaucoup de périodes mais il faut plus de points par
période).
Autres initiatives à volonté
• Compte tenu des commentaires sur les différentes expériences
abordées (de façon sous-jacente, on y devine l'évolution technique
entre 1980 et 2020 - même si des résultats intéressants peuvent
être obtenus avec du matériel très basique, en procédant
ingénieusement) on peut reprendre certaines expériences afin d'en
améliorer les résultats...
• On peut aussi s'intéresser à d'autres aspects, par exemple le
pendule pesant composé, le pendule de torsion...