M. VI - DYNAMIQUE ; ROTATIONS
Moment cinétique
• La mécanique du point peut être décrite sans rotation :
toute “rotation” d’un point est une translation curviligne (un point
ne tourne pas sur lui même).
La description sous forme de rotation est alors équivalente à celle
qui considère les translations, mais elle peut être utile pour
simplifier certains calculs en les réexprimant autrement.
• On peut ainsi définir le “moment cinétique”
d’un point matériel
par rapport
à un point
(qui n’est
pas forcément l’origine du repère) :
où
est la quantité de mouvement de
.
On peut en outre définir le “moment cinétique
algébrique” d’un point
par rapport
à un axe orienté
(arbitraire) :
où
est un vecteur unitaire orienté selon
et où
est un
point quelconque de
.
◊ remarque : le choix judicieux (arbitraire) du point
référence des
moments peut simplifier les calculs.
Moments des forces
• On peut définir d’une façon analogue le
“moment” (par rapport à un point
, qui n’est
pas forcément l’origine du repère) d’une force
appliquée à un point matériel
:
.
On peut de même définir le “moment algébrique”
par rapport à un axe orienté
(arbitraire) :
où
est un vecteur unitaire orienté selon
et où
est un
point quelconque de
.
Théorème du moment cinétique
• Dans de nombreux cas (mais pas tous), le
mouvement peut alors être décrit par le théorème du moment
cinétique :
; ou bien en projection sur un axe :
.
En effet :
; or
, d'où la relation précédente quand
(et en particulier si
est fixe).
◊ remarque : cette relation ne fournit une information
supplémentaire que pour le cas d’un système complexe ; pour
un point matériel elle équivaut au principe fondamental de la
dynamique.
◊ remarque : pour un point en rotation autour d’un
point
(à
distance
constante), on obtient :
;
on peut alors définir un “moment d’inertie”
et écrire :
(analogue à
, mais cette relation n’est valable que dans ce cas très
particulier).
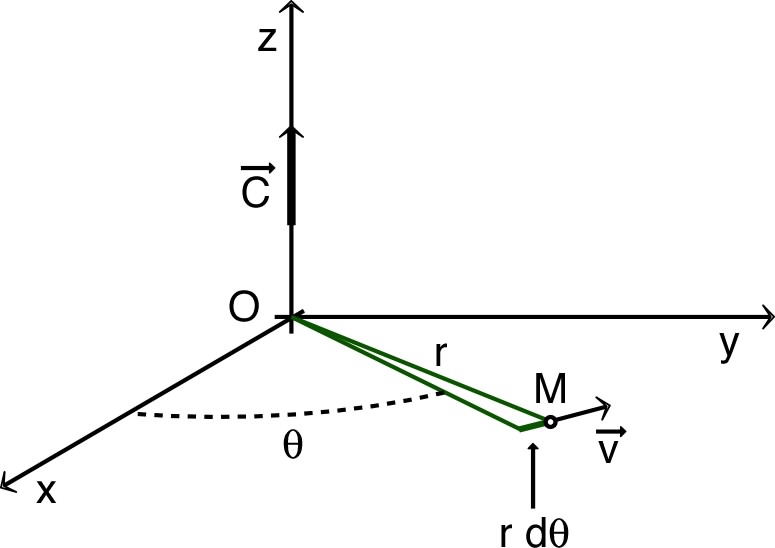
Exemples d’applications
Mouvements à force centrale
• Dans ce cas, avec
fixe
:
et
est constant.
Puisque
reste perpendiculaire à
, le mouvement de
se
fait dans le plan perpendiculaire à
et contenant
. |
|
|
En coordonnées polaires dans le plan du mouvement :
;
;
;
donc la quantité
est constante.
• La “vitesse aréolaire” (vitesse algébrique de “balayage” de l’aire
par
) est
:
; la constance de cette vitesse aréolaire pour les
mouvements à accélération centrale est appelée “loi des aires”.
◊ remarque : il faut ne pas confondre l’aire
et l’abscisse
curviligne
.
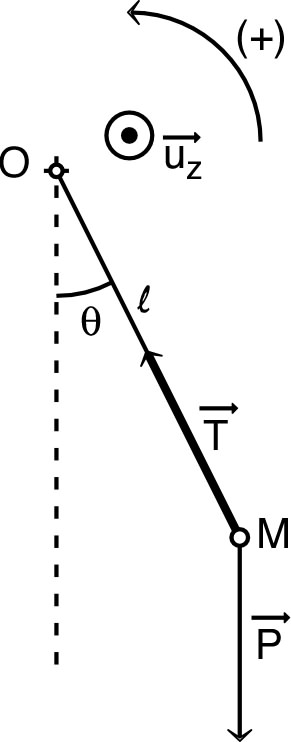
Pendule simple
• En se limitant au mouvement dans un plan
vertical :
et
;
c’est-à-dire algébriquement (avec
) :
et
.
Puisque
est
fixe :
c’est-à-dire :
.
Pour les petites amplitudes (
) :
d’où :
avec
. |
|
|
◊ remarque : si le pendule est lâché immobile, le mouvement débute
dans le plan vertical contenant
et (les forces
sont dans ce plan) ; mais si le mouvement est dans un plan vertical
contenant
, alors
donc le mouvement reste dans ce plan (perpendiculaire à
).
📖 exercices n° I, II et III.
Travail d'une force lors d'un mouvement circulaire
• Pour un point en mouvement circulaire (par
rapport à un point fixe
quelconque
sur un axe de rotation
) le travail d'une force
peut s'exprimer en fonction de son moment :
.
◊ remarque : on note généralement
; par ailleurs pour un vecteur
de norme constante :
.
◊ remarque : le produit mixte est invariant par “permutation
circulaire” :
.