|
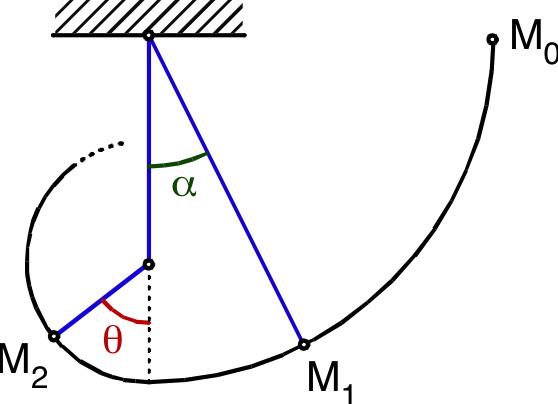
• En supposant que la position “à vide” du
ressort correspond à
, la masse
est
soumise à un moment de rappel :
correspondant à une énergie potentielle élastique
:
. L'expression de cette énergie potentielle peut se
retrouver en sachant que, lors d'une rotation
, le
travail d'une force de moment
peut
s'écrire
.
• L’énergie potentielle de pesanteur étant par ailleurs
:
, on peut écrire l’énergie mécanique sous la forme
:
.
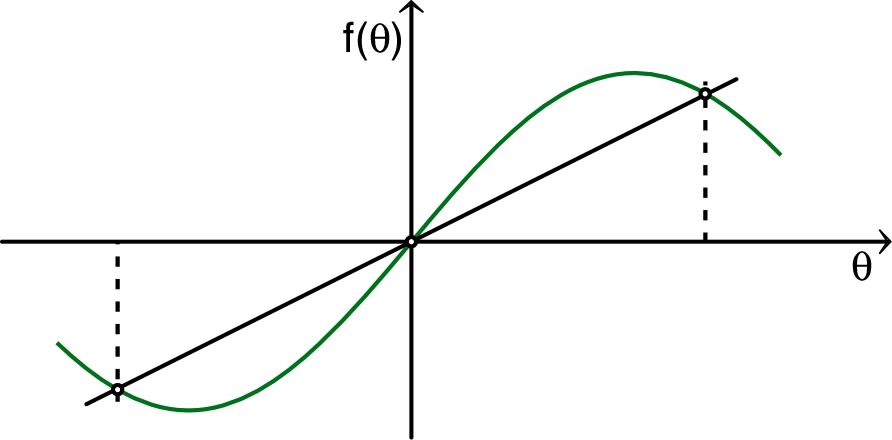
• Les positions d’équilibre correspondent à :
; il y a donc un équilibre évident pour
. La comparaison graphique des fonctions :
et
montre par ailleurs qu’il existe une autre position
d’équilibre
(en fait : une de chaque côté, par symétrie) si et
seulement si :
(droite de pente inférieure à la pente à l’origine de
la sinusoïde).
• L’équilibre est stable si et seulement si la dérivée
seconde (égale dans ce cas à la “raideur” de l’oscillateur)
est positive :
. Les pentes du graphique précédent montrent alors
clairement que :
- si
il y a un seul équilibre, stable, pour
; la raideur est :
;
- si
il y a un équilibre instable pour
et un équilibre stable pour
solution de :
; par rapport à la variable
,
la raideur est :
.
◊ remarque : pour
il y a une seule position d’équilibre, stable,
pour
, mais la raideur de l’oscillateur est alors nulle ;
il s’agit d’un oscillateur anharmonique dont le mouvement ne
peut pas être étudié aussi simplement : la période des
oscillations dépend de leur amplitude (et la période des
petites oscillations tend vers l’infini).
• L’équation du mouvement découle de la propriété :
; l’étude du mouvement correspondant à
; l’équation du mouvement est :
.
• En effectuant un développement limité au voisinage de
l’équilibre, pris comme origine (
), l’équation précédente se met sous la forme :
. La période des petites oscillations est par
conséquent :
.
◊ remarque : en utilisant une abscisse curviligne
, on obtient :
et
. |