• On en déduit la proportion des vitesses : .
• La troisième loi de Kepler donne par ailleurs : ; par comparaison : .
• On en déduit l'allure de la trajectoire :
| a. |
• Pour un mouvement circulaire, l’accélération est radiale et normale : (avec ). |
| b. |
• Si le mouvement circulaire de la Lune est dû à l’attraction terrestre, alors le champ de gravitation terrestre au niveau de la Lune est . |
| c. |
• Ceci donne : d’où une décroissance comme . |
| |
• D'après la troisième loi de Kepler, le
demi-grand-axe
et
la période
vérifient :
. ◊ remarque : en toute rigueur, l'année ne correspond pas exactement à un tour sur une ellipse car, à cause de différentes perturbations, le grand axe se décale légèrement à chaque tour (il y a un peu plus d'un tour entre deux périhélies successifs) ; en outre, pour des raisons analogues, l'axe des pôles change un peu de direction à chaque révolution autour du Soleil ; ainsi, l'année tropique est définie par le passage au point vernal, quand la direction Soleil-Terre recoupe le plan équatorial (mais la différence est très faible). • Les calculs sont simplifiés en unités astronomiques puisque pour la Terre : avec (par définition) : et . Par comparaison : ; par suite : . • En notant la demi-distance entre les foyers de la trajectoire (elliptique), la distance du périhélie est : ; par suite : . L'excentricité de l'ellipse est donc : et la distance de l'aphélie est : . |
| 1. |
• D'après la troisième loi de Kepler, le demi-grand-axe et la période vérifient : . Par ailleurs pour la Terre : donc . |
| 2. |
• La trajectoire a pour équation :
; le périgée est :
et l’apogée :
; le demi-grand-axe correspond à :
d’où on déduit :
. ◊ remarque : pour ne pas redémontrer, on peut aussi utiliser avec . • L’apogée correspond à une altitude : . |
| |
• En orbite à basse altitude, on peut
considérer que l’énergie potentielle de pesanteur est
pratiquement la même qu’à la surface du sol ; l’énergie à
fournir correspond alors essentiellement à une variation
d’énergie cinétique. • Le satellite initialement “immobile” au sol a une vitesse par rapport à un référentiel géocentrique orienté selon les directions d’étoiles “fixes”. Pour être en orbite à basse altitude, il doit avoir une période de révolution telle que : avec et une vitesse : . • Pour mettre le satellite en orbite dans le sens de rotation de la Terre, il suffit de faire passer son énergie cinétique de à d’où une énergie fournie . • Par contre, pour mettre le satellite en orbite dans le sens contraire de la rotation de la Terre, il faut compenser son mouvement initial pour le faire tourner dans l’autre sens (travail résistant non récupérable). Il faut donc fournir . • L’écart relatif est ainsi : . |
| 1. |
• Sur une orbite géostationnaire, la vitesse
de angulaire est la même que celle de la Terre sur elle-même
:
avec
(en fait il s'agit d'un jour sidéral et non d'un jour
solaire, mais la différence est négligeable en première
approximation), soit :
. • Sur la trajectoire géostationnaire, circulaire, l'accélération centripète est : et donc : (ceci équivaut à la troisième loi de Kepler). Par suite : en utilisant où est le rayon terrestre ; ainsi : . • La vitesse du satellite est par suite : . • L'énergie cinétique est : ; l'énergie potentielle est : ; l'énergie mécanique est : . |
| 2. |
• On peut étudier d'une façon plus générale
l'énergie cinétique en fonction des caractéristiques de la
trajectoire ; on peut en particulier utiliser le résultat
général démontré en cours pour les trajectoires non
circulaires :
(ceci se
démontre en considérant la loi des aires et la première
formule de Binet, avec l'expression de la trajectoire
elliptique en coordonnées polaires). • On peut écrire : et dans le cas général, au point de lancement ( ) : . Mais l'incertitude sur la vitesse : provoque une incertitude sur l'énergie : . • Pour une incertitude faible : ; mais par ailleurs: donc : . • De : on déduit alors : . • Le lancement, à l'apogée de la trajectoire de la fusée, correspond à une vitesse radiale nulle, donc à l'apogée ou au périgée de l'orbite du satellite. L'équation de la trajectoire : indique que le lancement correspond à : suivant le cas (signe de ). Par suite, puisque l'excentricité est positive : . |
| 3. |
• De on déduit : ; mais par ailleurs donc : . Une incertitude maximum de un tour par an correspond à donc : . |
| |
• D’après la troisième loi de Kepler : avec donc : . Si on compare cette masse à celle du Soleil, en supposant que celui-ci est une étoile “moyenne”, on peut penser que l’ordre de grandeur du nombre d’étoiles dans la galaxie est : . |
| 1. |
• La conservation du moment cinétique impose
un mouvement plan ; en coordonnées polaires dans le plan du
mouvement :
. • En considérant avec (loi des aires), on obtient et . La première formule de Binet est donc : . • On en déduit : . |
| 2. |
• L'énergie mécanique peut s'écrire :
avec
. • La conservation de l'énergie mécanique donne : . • Dans le cas général ( et non constants) le mouvement correspond à et donc : . • Les solutions sont de la forme : en prenant comme origine des angles la direction du point le plus proche de l'astre. |
| 1. |
• La relation fondamentale de la dynamique
peut s'écrire (en simplifiant par
)
:
. • La loi des aires correspond à donc : . • D'après la relation on en déduit : ; où est une constante d'intégration. |
| 2. |
• La composante orthoradiale de la vitesse est : . |
| 3. |
• Compte tenu de la loi des aires : en prenant comme origine des angles la direction du vecteur excentricité. |
| 1.a. | • En dérivant la propriété on obtient : . |
| 1.b. | • On peut considérer : . |
| 2.a. | • La relation fondamentale de la dynamique
peut s'écrire :
. • Par comparaison avec la relation précédente, on en déduit : . |
| 2.b. | • Puisque
est constant :
. On en déduit :
. ◊ remarque : le vecteur n'est pas indépendant du vecteur excentricité. |
| 3. | • En prenant l'orientation de
comme origine des angles, on peut écrire :
. • Mais par ailleurs : . • Par comparaison, on obtient : où on peut poser . |
| 1.a. | • L'énergie mécanique est initialement
(avec un
demi grand-axe
). La nouvelle valeur (divisée par deux) correspond à
un demi grand-axe
. ◊ remarque : pour un satellite l'énergie mécanique est négative, donc la diviser par deux correspond à une augmentation. |
| 1.b. | • La trajectoire proposée est incohérente car elle recoupe le cercle : il existerait des points de la nouvelle trajectoire plus proches que la position initiale. Or, le demi grand-axe ayant augmenté (presque) sans déplacement, le centre de la Terre est forcément le foyer le plus proche du point de changement d'orbite, c'est-à-dire que ce dernier est le périgée ; il est incohérent d'envisager une trajectoire ayant des points plus proches. |
| 2.a. | • La poussée tangentielle de courte durée ne
modifie pas la distance à la Terre, donc seule l'énergie
cinétique est modifiée :
. • On en déduit la proportion des vitesses : . |
| 2.b. | • Le moment cinétique est relié à constante
de la
loi des aires et à la vitesse aréolaire
;
ainsi :
. • La troisième loi de Kepler donne par ailleurs : ; par comparaison : . |
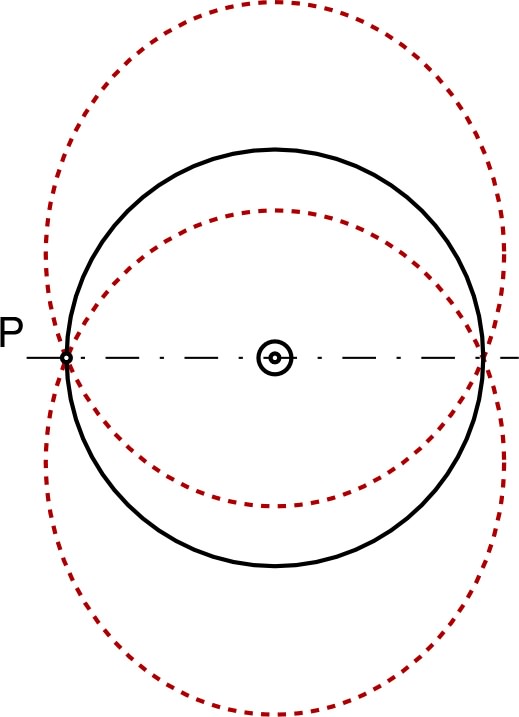
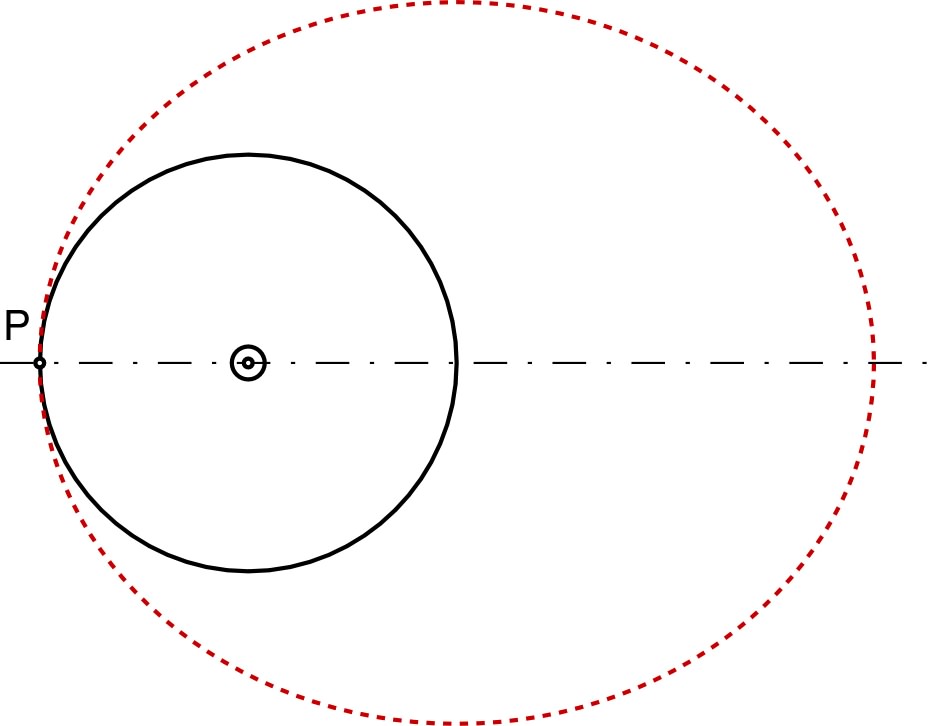
| 2.c. | • Le moment cinétique (constant sur la
trajectoire) peut s'écrire :
avant le changement d'orbite, puis
après. Par comparaison :
. • On en déduit l'allure de la trajectoire : |
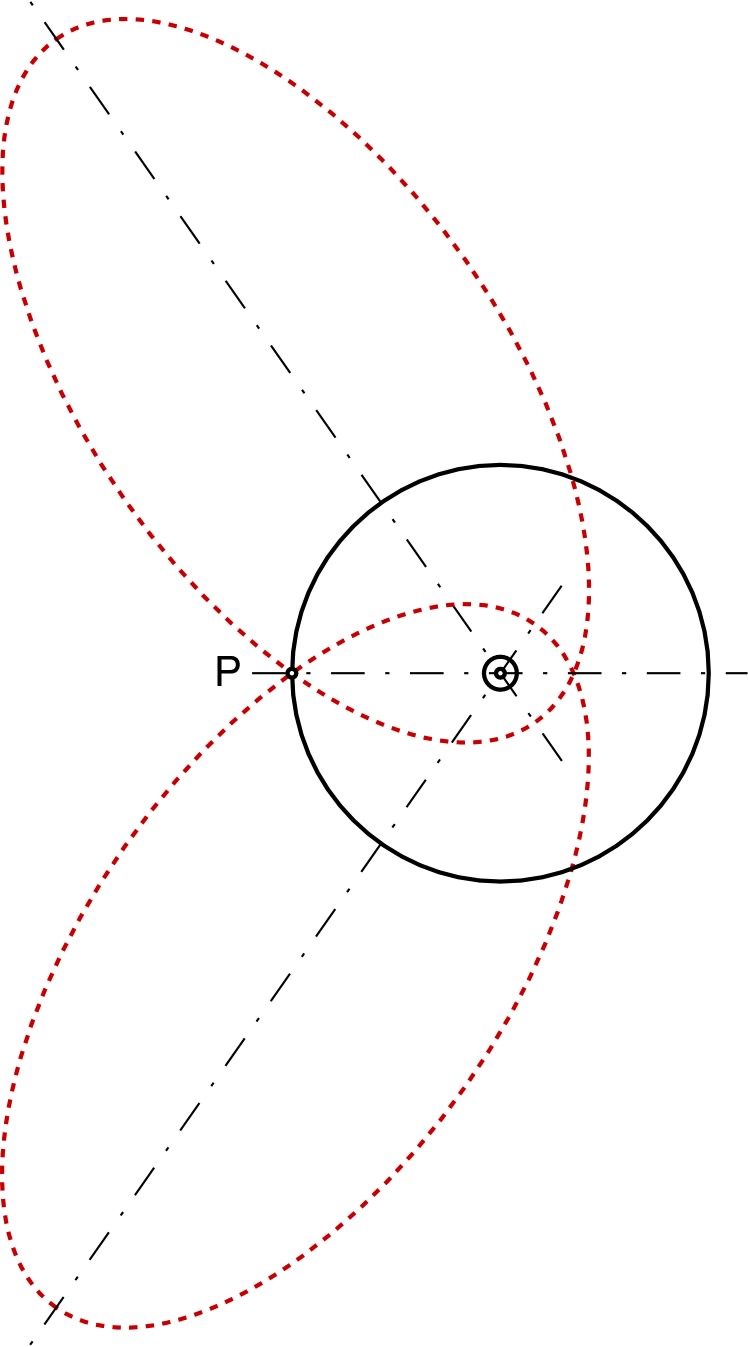
| 3.a. | • Pour modifier la trajectoire d'une façon
qui ne modifie pas le moment cinétique, il est nécessaire et
suffisant d'exercer une force centrale. D'après (2.b), on
peut préciser que le moment cinétique non modifié impose que
varie proportionnellement à
.
|
|
 |
| 1. |
• Pour un potentiel gravitationnel de la
forme
le champ gravitationnel est (dans le plan équatorial)
:
. • D'après la seconde formule de Binet : , donc l'équation différentielle du mouvement peut s’écrire : . |
| 2. |
• Si on cherche une solution approchée sous
la forme :
l'équation différentielle du mouvement correspond à
:
(en
négligeant le terme en
). • On obtient par identification : et d'où on déduit : (donc dans la limite où le terme correctif est petit) et . • Ceci correspond à un mouvement approximativement elliptique, mais tel qu'à chaque période du cosinus (pseudo-période du mouvement) correspond une variation angulaire telle que : , c'est-à-dire : . • Si on néglige le terme en (comme dans l'approximation précédente) l'avance du périhélie est : . |
| 3. |
• On obtient pour mercure : pour une pseudo-période. Or, il y a de dans un siècle ; donc ceci correspond à une avance du périhélie : par siècle. |
| 1. |
• Si on cherche une solution approchée sous
la forme :
l'équation différentielle du mouvement correspond à
:
(en négligeant le terme en
). • On obtient par identification : et d'où on déduit : (donc dans la limite où le terme correctif est petit) et . • Ceci correspond à un mouvement approximativement elliptique, mais tel qu'à chaque période du cosinus (pseudo-période du mouvement) correspond une variation angulaire telle que : , c'est-à-dire : . L'avance du périhélie est : . • Pour une trajectoire elliptique, on établit les relations : ; ; ; ; on en déduit : si on néglige le terme en comme cela a été fait dans l'approximation précédente. |
| 2. | • On obtient pour mercure : pour une pseudo-période. Or, il y a de dans un siècle ; donc ceci correspond à une avance du périhélie : par siècle. |