M. IX - DYNAMIQUE ; SYSTÈMES DE POINTS
Éléments cinétiques d’un système de points
• Le centre d’inertie
(ou
barycentre des masses) d’un système de points
peut être défini par :
ou aussi :
.
On en déduit par dérivation la quantité de
mouvement totale du système, aussi appelée “résultante cinétique”
:
. Le
point
est donc un
bon représentant de cette quantité.
• La situation est un peu différente pour les
rotations : le moment cinétique total
est généralement
différent de
.
Par contre, si tous les
sont égaux (
), alors on peut écrire :
;
la condition pour qu’un système puisse être représenté par un point
matériel est en fait que tous les
soient égaux : ni déformation, ni rotation, ce qui correspond à un
solide en translation.
• Le changement de centre de référence des
moments correspond à :
.
◊ remarque : un système peut pour cet aspect être traité
comme un point matériel si
(absence de rotation globale, éventuellement par compensation)
; ceci conduit alors en effet à
.
• De même pour l’énergie cinétique :
est généralement
différente de
.
Par contre, si tous les
sont égaux (
), alors on peut écrire :
.
📖 exercices n° I et II.
Éléments résultants des forces
• Puisque les forces intérieures se compensent
deux à deux (actions réciproques), la “résultante dynamique”
(somme des forces exercées sur le système) est égale à la somme
des forces “extérieures” :
.
• La situation est analogue mais un peu moins évidente pour le
“moment dynamique” (somme des moments des forces exercées sur le
système) ; en effet, deux forces opposées n’ont pas forcément des
moments opposés (ils peuvent même être égaux) : tout dépend des
droites d’action.
Si les
sont des points matériels (en
particulier sans effet magnétique) alors les actions réciproques
intérieures opposées ont de plus même droite d’action, parallèle à
leur direction commune ; par suite leurs moments sont opposés :
.
On obtient alors :
.
• Le changement de point de référence correspond
à :
.
Théorèmes de la dynamique des systèmes
• Dans un référentiel galiléen, le principe
fondamental de la dynamique peut se généraliser en un “théorème de
la résultante cinétique” (ou “théorème du centre d’inertie”)
:
.
• D’une façon analogue, dans un référentiel
galiléen, le principe fondamental de la dynamique de rotation se
généralise en un “théorème du moment cinétique” : par
rapport à un point
fixe
:
.
◊ remarque : plus généralement pour
mobile
.
Mais, cas particulier “exceptionnel”, le
théorème se généralise par rapport au barycentre
(mobile)
:
.
• La situation est analogue pour l’énergie
cinétique (dans un référentiel galiléen) :
; mais
il
n’y a en général pas compensation des travaux des forces
intérieures.
Pour un système sans déformation, si les
sont des
points matériels, alors les actions réciproques intérieures
(opposées) ont une même droite d’action selon leur direction commune
; donc leurs travaux sont opposés :
.
Par ailleurs, pour
constant :
;
or
donc
; on obtient alors :
.
◊ remarque : le travail des forces intérieures est donc indépendant
du référentiel, puisque tout changement ne fait qu'ajouter une
translation et une rotation d'ensemble sans déformation
supplémentaire, d'où une contribution nulle.
◊ remarque : dans un référentiel non galiléen, il faut tenir compte
des travaux des forces d’inertie d’entraînement ; par contre, les
forces d’inertie complémentaires
ne
travaillent pas.
📖 exercices n° III, IV, V et VI.
Référentiel barycentrique
• On appelle “référentiel barycentrique” (noté ici
) le
référentiel d’origine
, en
translation (quelconque) par rapport à un référentiel galiléen.
L’intérêt du référentiel barycentrique, généralement non
galiléen, est de séparer l’étude du mouvement d’un système en
une translation d’ensemble et une rotation-déformation par rapport à
.
• Dans le référentiel barycentrique, la propriété
impose que le moment cinétique
y est indépendant du point de référence (donc non précisé) ;
d'un autre point de vue, cela impose que le travail des forces
intérieures y est nul.
Une autre particularité utile est la propriété :
(dans galiléen) ;
on en déduit :
sans forces d’inertie, même si le référentiel
barycentrique n’est pas galiléen (ceci revient à dire que la
somme des moments des forces d’inertie est toujours nulle).
Solide en rotation autour d'un axe fixe
• Pour un point
en rotation
autour d’un point
(à
distance
constante), on obtient :
; on peut alors définir un “moment d’inertie”
et écrire :
;
;
;
.
Pour l'ensemble des points constituant un solide en rotation
autour d'un axe fixe, avec des coordonnées cylindriques selon cet
axe :
(la
vitesse angulaire est commune). On peut alors généraliser les lois
précédentes en définissant un moment d’inertie total
.
• En pratique, il faut toutefois généralement calculer la somme par
intégration ; ainsi pour un cylindre homogène, de rayon
et de
longueur
, tournant
selon son axe :
.
Ceci peut s'écrire en fonction de la masse du cylindre :
; on obtient ainsi (dans ce cas particulier) :
.
• On peut aussi raisonner sur l'énergie cinétique :
;
;
.
• D'un autre point de vue, lorsqu'on utilise des pièces mécaniques
rotatives, on diminue l'usure et on améliore l'efficacité en
“équilibrant” le dispositif :
- centre d'inertie et axe de symétrie selon l'axe de rotation
(les roues des voitures ont ainsi des masselottes placées sur le
pourtour de la jante pour mieux équilibrer) ;
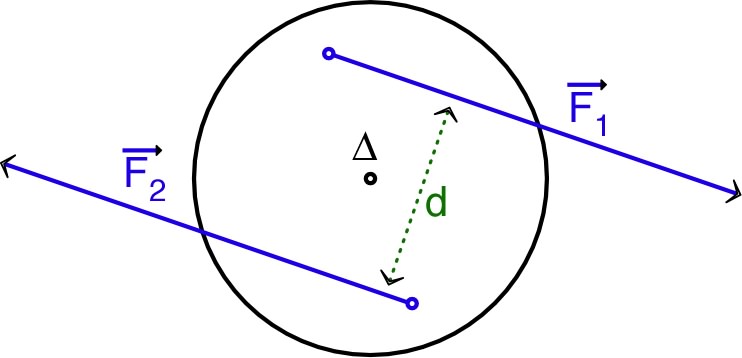
- interactions par des “couples de forces” symétriques
dont la somme est nulle ; sur le schéma ci-contre :
;
(noté
) ;
(noté
) .
|
|
|
📖 exercice n° VII.
Théorème du viriel
• On considère un système de
points
matériels en interaction gravitationnelle (pouvant décrire une
galaxie, un amas de galaxies...), supposé en équilibre statistique.
Ce système est supposé rester borné ; il est étudié par rapport à
son référentiel barycentrique, présumé quasi galiléen.
On note
; le moment d'inertie
est tel que :
.
Or, pour un système borné en équilibre statistique, on obtient en
moyenne dans le temps :
.
• On peut de plus considérer :
où les forces peuvent s'écrire :
.
Ainsi, en combinant les indices :
;
;
.
Compte tenu du fait qu'en faisant la somme des énergies potentielles
d'interaction des masses
dans un
potentiel
on compte deux fois
les interactions des paires
, on obtient finalement :
.
• Par ailleurs :
; donc au
total :
.
Ceci généralise une propriété déjà remarquée pour un satellite en
orbite circulaire :
(où ces énergies sont dans ce cas constantes).