| 3.a. |
• Si on considère simplement que le liquide
entrant à l'extrémité du tube a une vitesse relative
de sens contraire, on obtient :
;
(où
est de sens contraire) ;
;
.
• Avec les notations précédentes, l'équation peut s'écrire
:
.
• Pour une vitesse initiale nulle, on obtient la solution
divergente :
.
◊ remarque : pour toute vitesse initiale
(correspondant au cas
où la vitesse d'admission est radiale), on obtient de
même une solution divergente.
• Bien que le système soit déformable, donc qu'une
augmentation de l'énergie cinétique puisse être causée par
un travail des forces intérieures, le caractère divergent
suggère un défaut de modélisation.
◊ remarque : contrairement à ce que le cas particulier
pourrait laisser penser, la divergence se fait vers
les valeurs de
positives. |
|
|
| 3.b. |
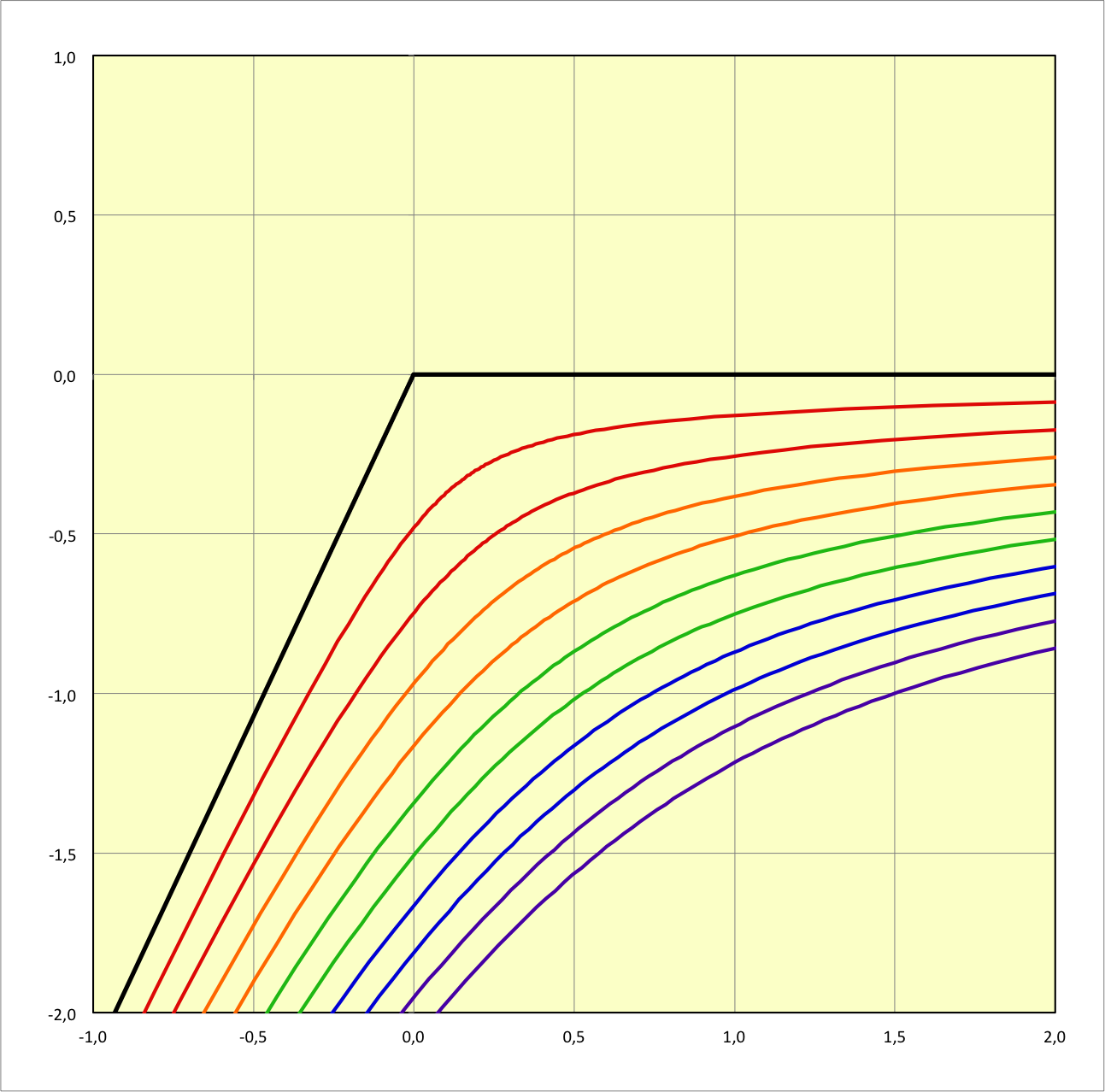
• Avec un frottement fluide visqueux,
l'équation devient :
.
• Ceci peut aussi s'écrire :
.
• La vitesse limite est augmentée (en valeur absolue)
:
; la constante de temps est augmentée dans les
mêmes proportions :
.
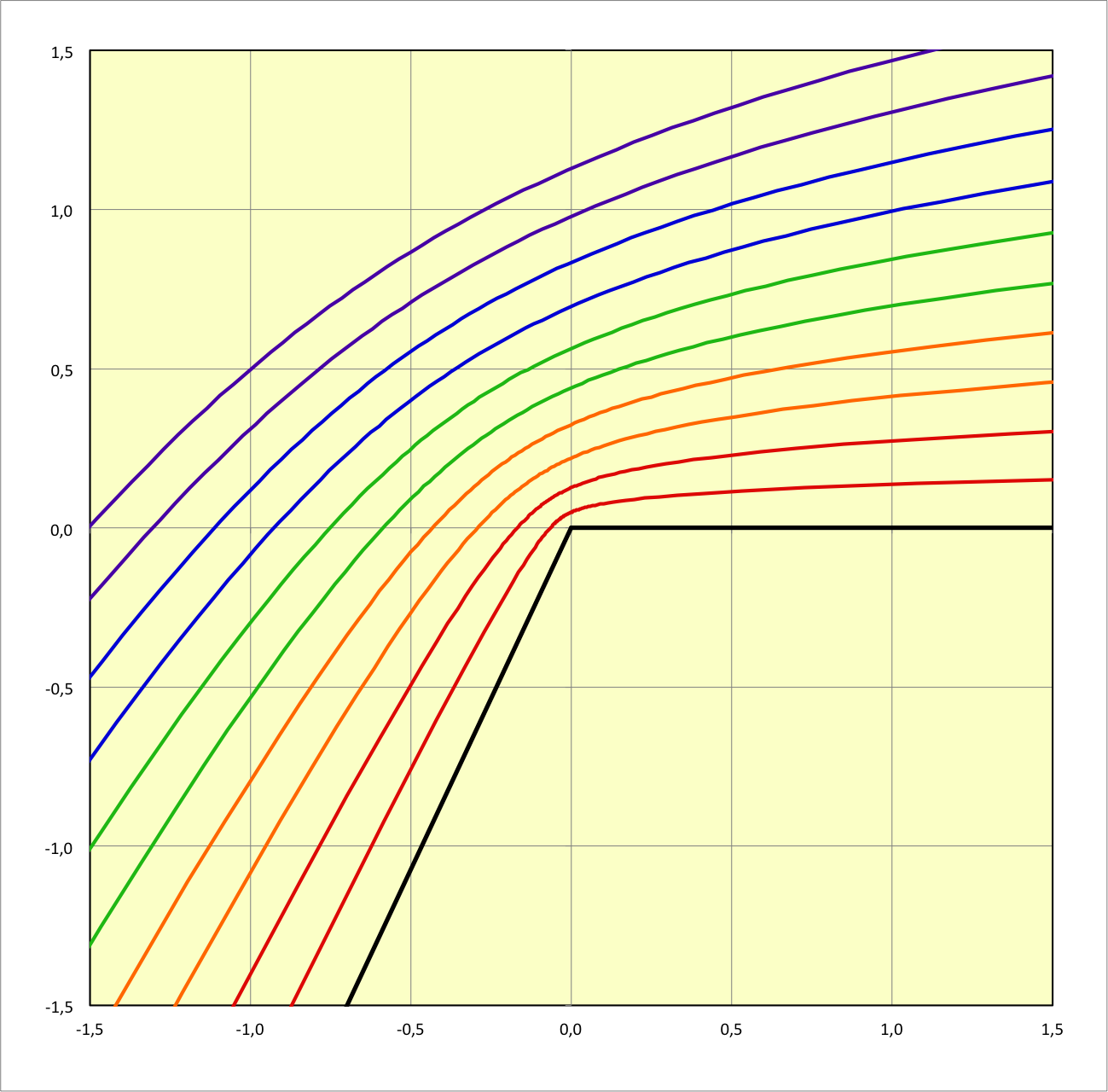
• Certes, ici encore
et
augmentent dans les mêmes proportions, donc l'accélération
initiale
correspondant à un frottement nul est inchangée.
Certes, un frottement de faible coefficient
ralentit l'évolution du mouvement (ici la divergence), comme
généralement pour ce type d'effet. Mais par ailleurs un
frottement d'assez grand coefficient
change le signe de
et (en
passant par l'infini) : le mouvement change de sens et
devient convergent. Or, un frottement peut s'opposer au
mouvement et le ralentir (en dissipant de l'énergie), mais
il ne peut pas en changer le sens. Cela ne peut que
renforcer les soupçons qui pèsent sur la modélisation. |
|
|
| 3.c. |
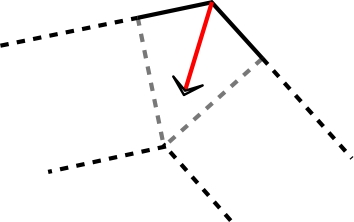
• Le liquide entrant à l'extrémité du tube a
une vitesse
correspondant à une vitesse relative
de sens contraire, mais il n'acquiert cette vitesse que par
interaction avec le tourniquet. Il n'apporte pas au système
la quantité de mouvement correspondante puisqu'il ne
l'acquiert qu'une fois intégré au système et interagissant
avec ses autres parties.
• Le raisonnement précédent peut éventuellement s'appliquer,
mais avec pour ce fluide entrant une vitesse nulle avant
absorption :
;
;
.
• Ceci correspond à une rotation uniforme, donc il est plus
judicieux d'ajouter un frottement. On obtient ainsi une
vitesse limite nulle et une constante de temps associée à la
dissipation :
;
.
|
|
|
| 3.d. |
• Si on suppose le tube initialement vide
(rempli d'air), la rotation du tourniquet (initialement
immobile) pourrait commencer dès que du liquide entre à
l'extrémité ; si une différence de pression peut faire
entrer du liquide dans le tube (elle est indispensable pour
provoquer sa mise en mouvement), elle peut aussi tendre à
entrainer le coude en sens inverse (résultante des forces
pressantes sur le coude comme dans la partie 2.a).
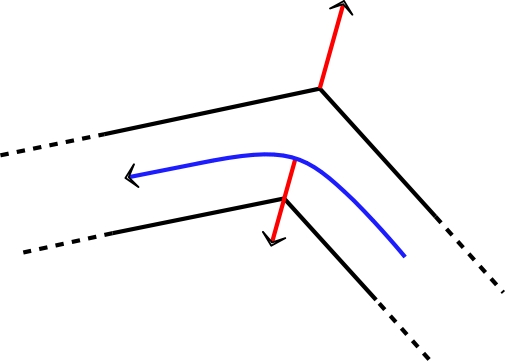
• Par contre, dès que du liquide passe le coude,
l'interaction avec le tube dévie l'eau et l'action
réciproque tend à mettre le tube en mouvement dans le sens
anti-horaire (puisque le passage du coude dans l'autre sens
ne modifie pas le sens des force résultantes sur le fluide
et sur le tube).
◊ remarque : cela se retrouve de même selon la mécanique des
fluides.
• Contrairement à la situation observée pour le tourniquet
en mode d'éjection (l'effet à l'extrémité n'était qu'une
correction du second ordre), l'expérience montre que pour
l'admission les deux effets se compensent généralement.
Cette différence quantitative peut se comprendre dans la
mesure où ce mode nécessite de mettre en mouvement le fluide
en partant d'une vitesse nulle ; le terme correspondant est
alors nettement plus important.
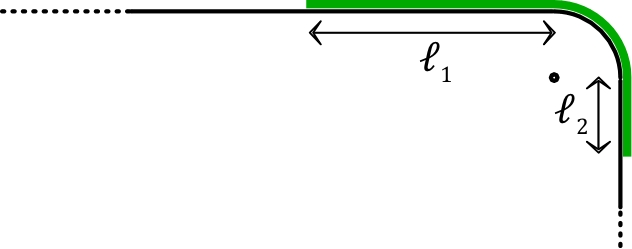
| • La mécanique des fluides permet
de préciser. En partant d'une vitesse nulle, le
fluide est aspiré dans le tube en provenant de toute
la périphérie (il n'y a pas de “jet”) et les ligne
de courant ne décollent pas de la surface. En
contournant le bord de façon plus abrupte, la
dépression par effet Venturi au voisinage de
l'extrémité est nettement plus marquée et permet
ainsi l'importante accélération nécessaire. |
|
|
|
|
|
| 3.e. |
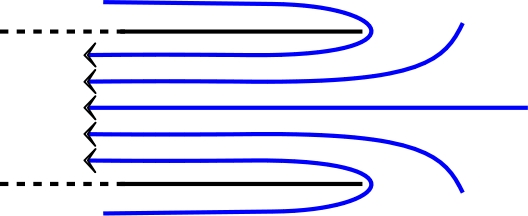
• L'interaction au niveau de l'extrémité du
tube peut dépendre notablement des lignes de courant,
elles-mêmes dépendant de la forme du bord. Sans entrer dans
le détail d'une description par la mécanique des fluides, on
peut suggérer l'intervention d'un effet Venturi dans
certains cas encore plus important : l'écoulement plus
rapide au niveau de l'extrémité où les lignes de courant se
resserrent cause une dépression supérieure et cet effet
l'emporte un peu. |