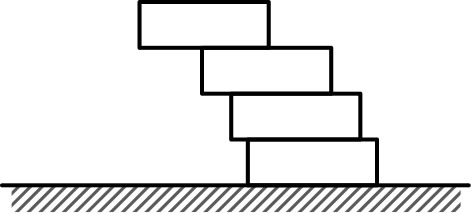
| b) En raisonnant de la même façon de proche en proche, quel nombre minimum de morceaux de sucre faut-il disposer sur la table pour que la projection du premier sur le plan horizontal soit entièrement extérieure au dernier morceau (qui est au contact de la table) ? | |
 |
 |