AMPLIFICATEUR OPÉRATIONNEL “IDÉAL” EN MODE “SATURÉ” - corrigé
du TP
2. Caractéristique des modes linéaire et “saturé”
• En attente de données fournies par les étudiants...
3. Montage “comparateur”
• En attende de données fournies par les étudiants...
4. Montage amplificateur non-inverseur en mode “saturé”
• Le montage est réalisé avec un générateur B.F. réglé sur la
fréquence
(mesurée avec le fréquencemètre incorporé). Les signaux enregistrés
sur l'ordinateur donnent alors
. L'étude des fichiers informatiques laisse par contre
soupçonner que les données ont été mal traduites de
(1024) en
(1000) ; la fréquence serait ainsi
tout à fait compatible.
• Les résistances utilisées sont
et
.
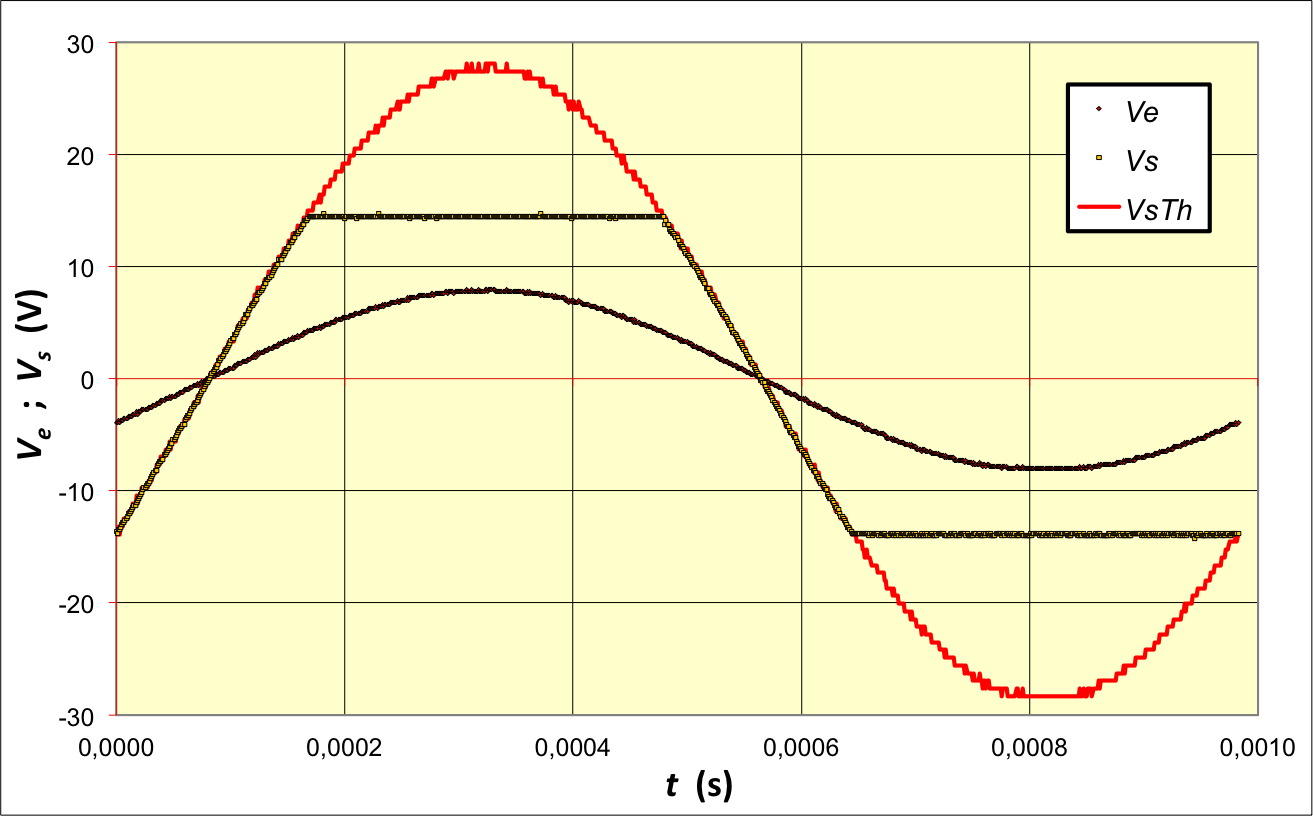
• On peut considérer en mode linéaire :
; or, puisque ,
le branchement en sortie est un pont diviseur de tension
: ; inversement
:
.
Les mesures montrent un signal
correctement décrit par ce modèle, mais seulement dans les limites
d'un effet de saturation.
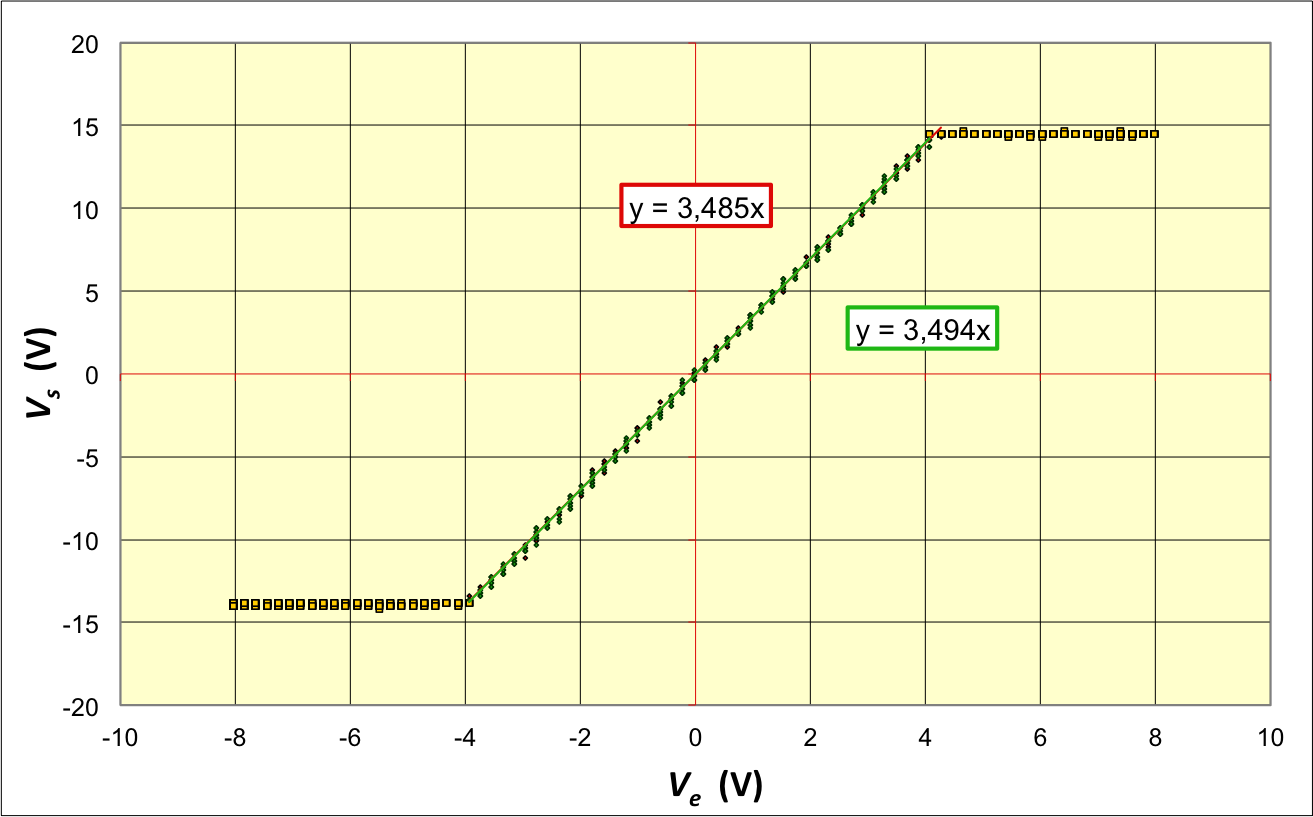
• La représentation en mode “XY” donne la caractéristique complète
(incluant la saturation).
La pente de la partie linéaire correspond à un gain
; le modèle proposé est tout à fait compatible : .
La saturation est observée pour :
; . Ceci est
à comparer aux tensions d'alimentation :
; . On
observe une très légère dissymétrie, mais raisonnablement compatible
avec les incertitudes de mesure.
◊ remarque : on constate que la saturation intervient (en valeur
absolue) environ au dessous
de la tension d'alimentation ; ceci donne bien l'ordre de grandeur,
mais montre une dépendance par rapport aux détails des circuits
intégrés des A.O..
5. Montage “comparateur à hystérésis”
5.1. Caractéristique “statique”
• Le montage est réalisé avec un générateur B.F. réglé sur une
fréquence plus faible (pour observer les bascules de la
saturation)
(mesurée avec le fréquencemètre incorporé). Les signaux enregistrés
sur l'ordinateur donnent
(après correction de l'échelle de temps).
• Les résistances utilisées sont
et
.
• La démonstration théorique précédente pour le mode linéaire est
toujours valable puisqu'elle utilise qui
n'est pas modifié par la permutation des deux bornes :
pour
.
Pour le mode saturé
, on doit considérer car
de même signe ( ). Ceci
correspond à : donc
.
De même pour
, on doit considérer car
de même signe ( ). Ceci
correspond à : donc
.
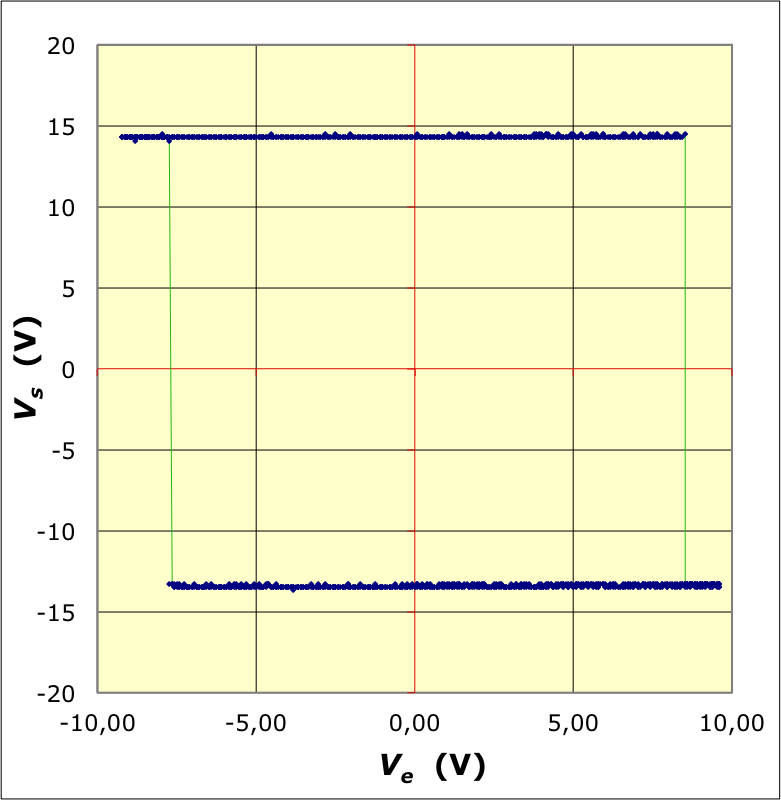
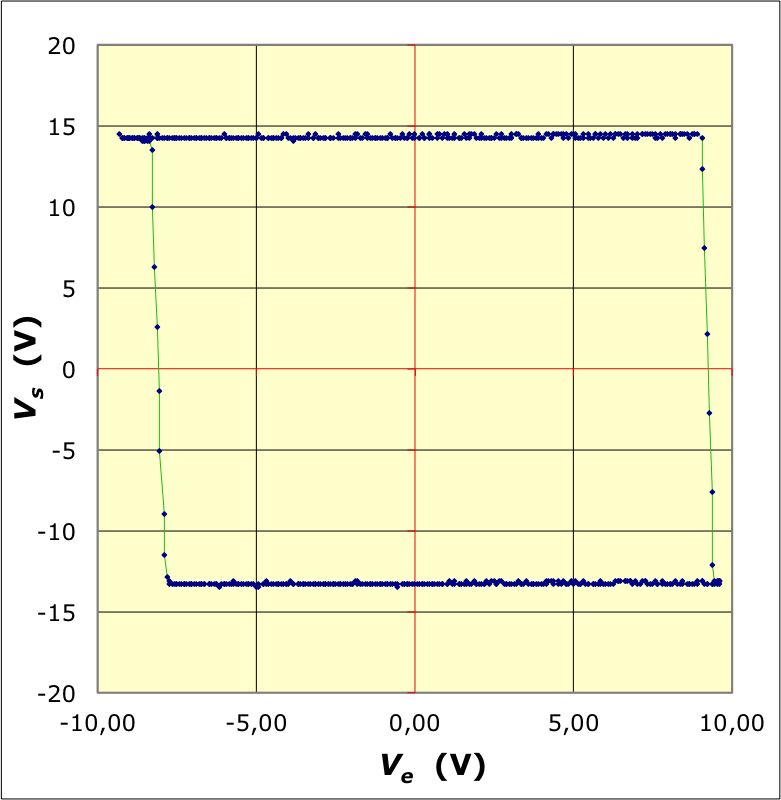
5.2. Caractéristique “dynamique”
• On vérifie expérimentalement, en mode “XY”, que la caractéristique
observée est du type indiqué (l'énoncé indique le raisonnement
justificatif).
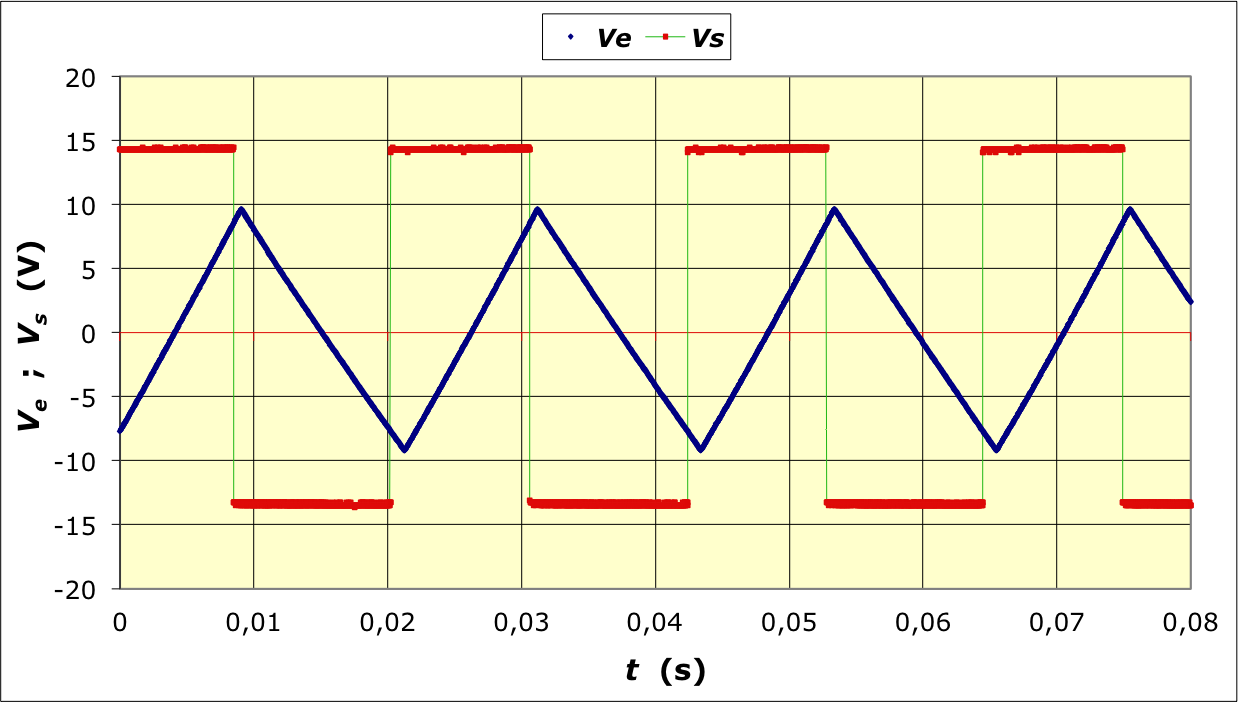
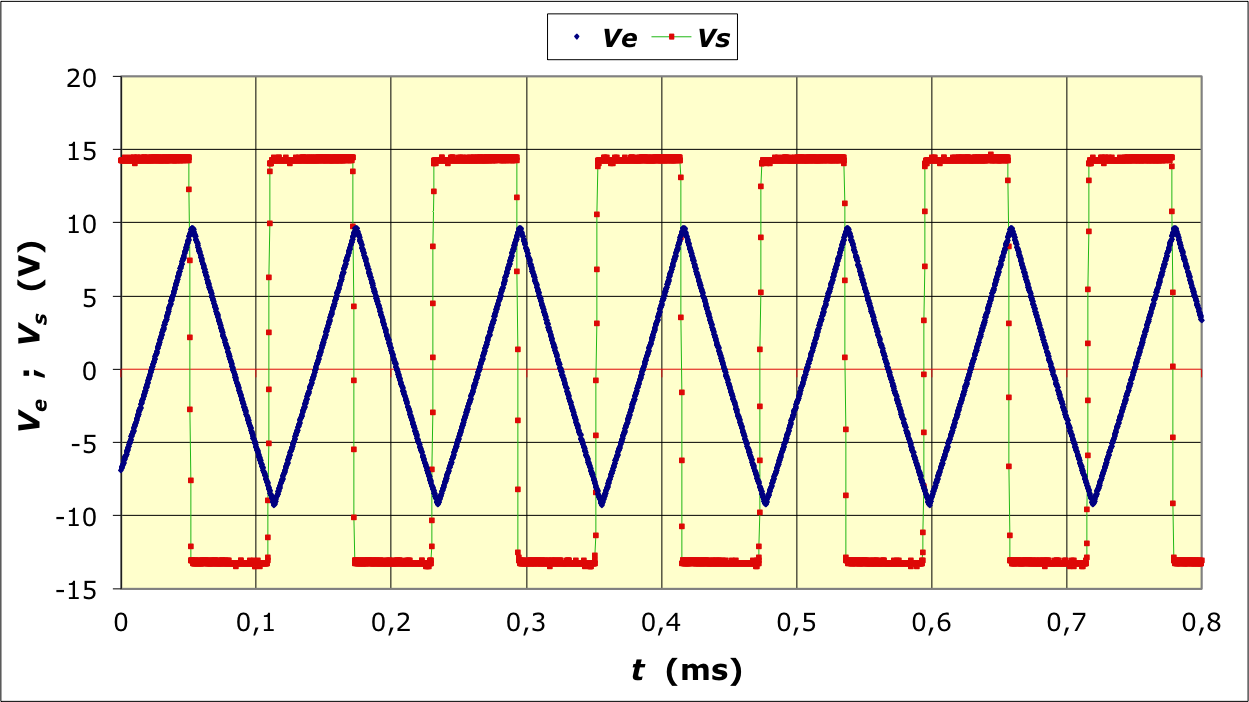
◊ remarque : on choisit ici un signal triangulaire pour répartir
plus régulièrement les points mesurés.
• Les tensions d'alimentation sont
et . La sortie
débite un courant et la
chute de tension dans la résistance de sortie est
avec (pour de
nombreux A.O.).
On constate les saturations pour
et . Le
décalage par rapport aux tensions d'alimentation est de l'ordre de
grandeur de ; sa
cause, non expliquée par la résistance de sortie, est liée de façon
non évidente à la structure interne de l'A.O. réel (non idéal).
• Les vérifications de l'influence de et sur les
tensions de “bascule” ont été faites visuellement par les étudiants
: ils n'ont pas donné plusieurs séries de mesures correspondantes.
• L’allure des signaux obtenus en mode “A et B” permet aussi
d'observer les tensions de “bascule”.
• Les tensions de “bascule” sont
et . En
considérant le gain ces
valeurs sont compatibles avec
et
.
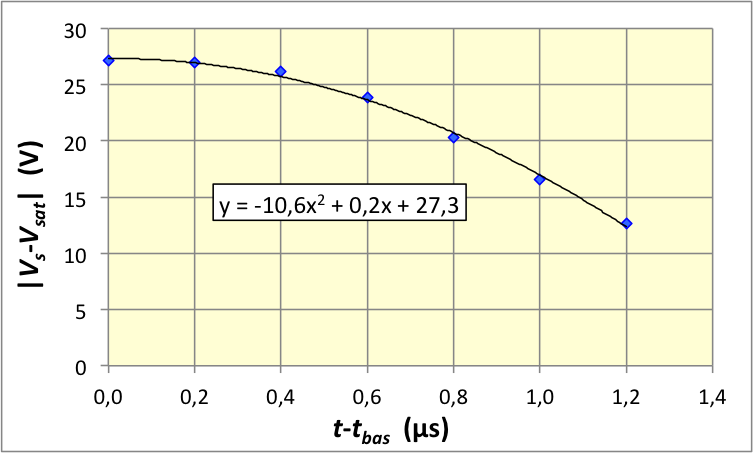
• Les étudiants de ce groupe de TP se sont alors intéressés à tester
l'influence de la vitesse de bascule en effectuant des mesures à une
fréquence volontairement exagérée
(mesurée avec le fréquencemètre incorporé). Les signaux enregistrés
sur l'ordinateur donnent
(après correction de l'échelle de temps).
On réussit alors à obtenir quelques points de mesure sur la durée
(en proportion plus longue) de la bascule.
On constate les saturations pour
et
(comparables aux mesures précédentes).
• L’allure des signaux obtenus en mode “A et B” permet aussi
d'observer les tensions de “bascule”.
• Les tensions de “bascule” sont
et .
Pour
ces valeurs ne sont pas incompatibles avec
et
.
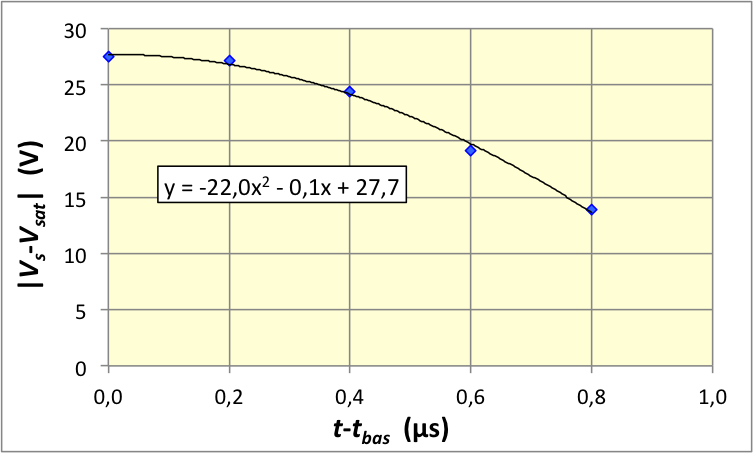
• Dans ce cas on peut en outre étudier l'évolution lors de la
bascule. Pour décrire la transition entre les deux saturations, on
peut considérer l’équation qui décrit l’A.O. réel :
en mode linéaire puisqu'alors la sortie n'est pas saturée. On
suppose ici une bascule de à .
Pour un signal triangulaire, on peut considérer :
avec
car continue à
varier pendant la bascule. Avec
on obtient :
.
Mais donc
:
. Avec
on peut écrire :
.
Les solutions de l'équation “homogène” sont de la forme
:
; pour l'équation complète on peut utiliser la méthode de
variation de la constante en cherchant :
. En reportant dans l'équation, puis en imposant la condition
initiale
on obtient :
.
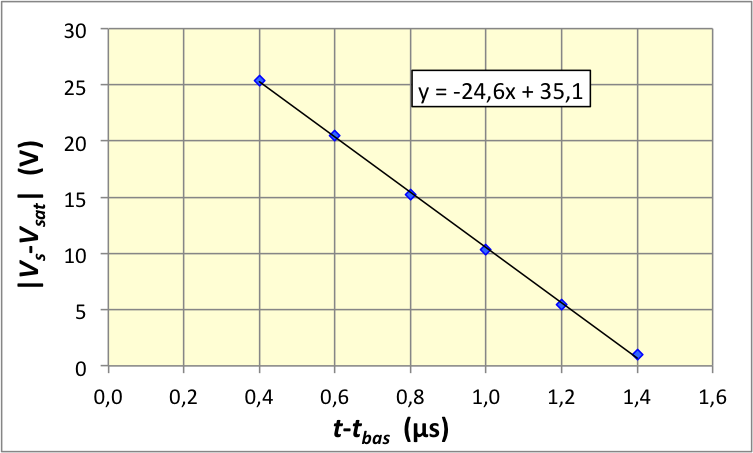
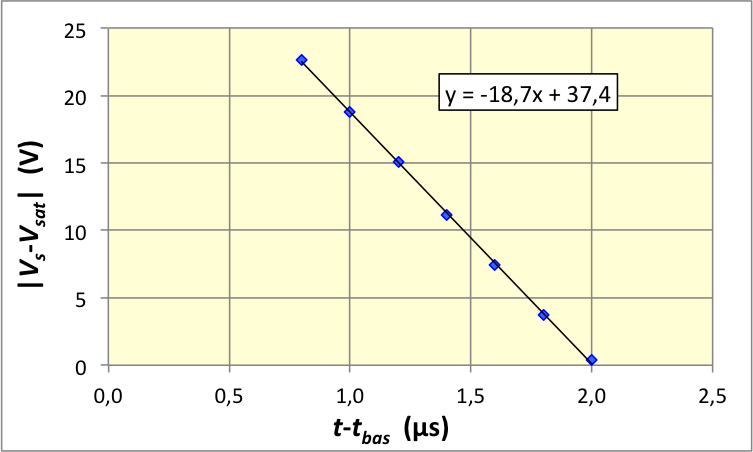
• Pour le début de la bascule, on peut considérer : ;
.
En pratique les courbes ajustées sur les données ont un (petit)
terme d'ordre 1 car les bascules ne correspondent jamais exactement
aux instants de mesure.
On obtient
pour les bascules décroissantes et
pour les bascules croissantes ; cela confirme que la structure
interne de l'A.O. n'est pas tout à fait symétrique.
Ceci peut être comparé aux valeurs usuelles
et
avec
; on obtient ainsi :
; l'A.O. étudié peut être plus rapide ( ; peu
d'exemples de valeurs sont cités) mais on ne dispose pas
d'informations suffisantes pour conclure précisément.
• Pour la suite de la bascule, la “vitesse de balayage”
augmente et arrive à une valeur de saturation . Tant
que la saturation opposée n'est pas atteinte ( )
ceci donne : .
On obtient
pour les bascules décroissantes et
pour les bascules croissantes (ici encore dissymétrique). Il existe
des A.O. plus rapides, mais aussi des plus lents.
◊ remarque : pour observer plus précisément le balayage non saturé
il faudrait plus faible,
donc un gain d'autant plus
grand (pour atteindre la limite de bascule), mais il est intéressant
d'observer cette saturation.
6. Multivibrateur astable
• En attende de données fournies par les étudiants.
• Pour étudier le modèle théorique, on peut partir du fait qu'on
observe expérimentalement une succession de paliers à saturation.
Supposons initialement
; alors .
Or
impose que le condensateur soit peu chargé ; notons sa tension
initiale (on raccordera ensuite quand on repassera par le même
état). Ainsi : , ou encore
:
, ce qui donne :
.
Ceci aboutit à une bascule pour
, c'est-à-dire :
.
Le raisonnement est ensuite analogue en partant de
; le condensateur se décharge puis se recharge en sens inverse
jusqu'à une autre bascule et ainsi de suite. Ceci nous conduit à
considérer qu'en régime permanent on peut partir de
, donc en reportant : .
La période correspond à la durée de deux bascules, donc
: .
◊ remarque : à partir de cet oscillateur en “créneaux”, il suffit
d’ajouter un intégrateur pour obtenir un oscillateur en “dents de
scie”, puis d’ajouter un second intégrateur pour obtenir un
oscillateur en “arcs de paraboles”... qui ressemble à s’y méprendre
à un oscillateur sinusoïdal (approximation suffisante pour de
nombreux dispositifs).