AMPLIFICATEUR OPÉRATIONNEL “IDÉAL” EN MODE LINÉAIRE -
corrigé du TP1
2. Réglage préalable ; montage “suiveur de tension”
◊ remarque : l'expérience montre que, sur l'ensemble des boitiers
d'A.O. mis à la disposition des groupes de TP, il y en a presque
toujours quelques uns déréglés (mais avec un montage suiveur de
tension, il suffit d'agir sur la vis de réglage de l'A.O. pour
ramener la tension à zéro).
3. Montage “amplificateur non inverseur”
3.1. Tracé automatique de la caractéristique
• Le montage est réalisé avec un générateur B.F. réglé sur la
fréquence
(mesurée avec le fréquencemètre incorporé). Les signaux enregistrés
sur l'ordinateur correspondent à
. L'écart montre que les incertitudes sont un peu sous-estimées,
mais cela importe peu pour ce montage.
• Les résistances doivent être supérieures à
pour limiter le courant de sortie ; quand (à la
saturation) le courant maximum de sortie est ainsi
(en deça de la saturation).
Elles doivent être inférieures à
pour négliger le courant dans les entrées et (donc la
résistance est généralement d'au moins
)
en comparaison de celui dans les résistances du montage.
• Les résistances utilisées sont
et
.
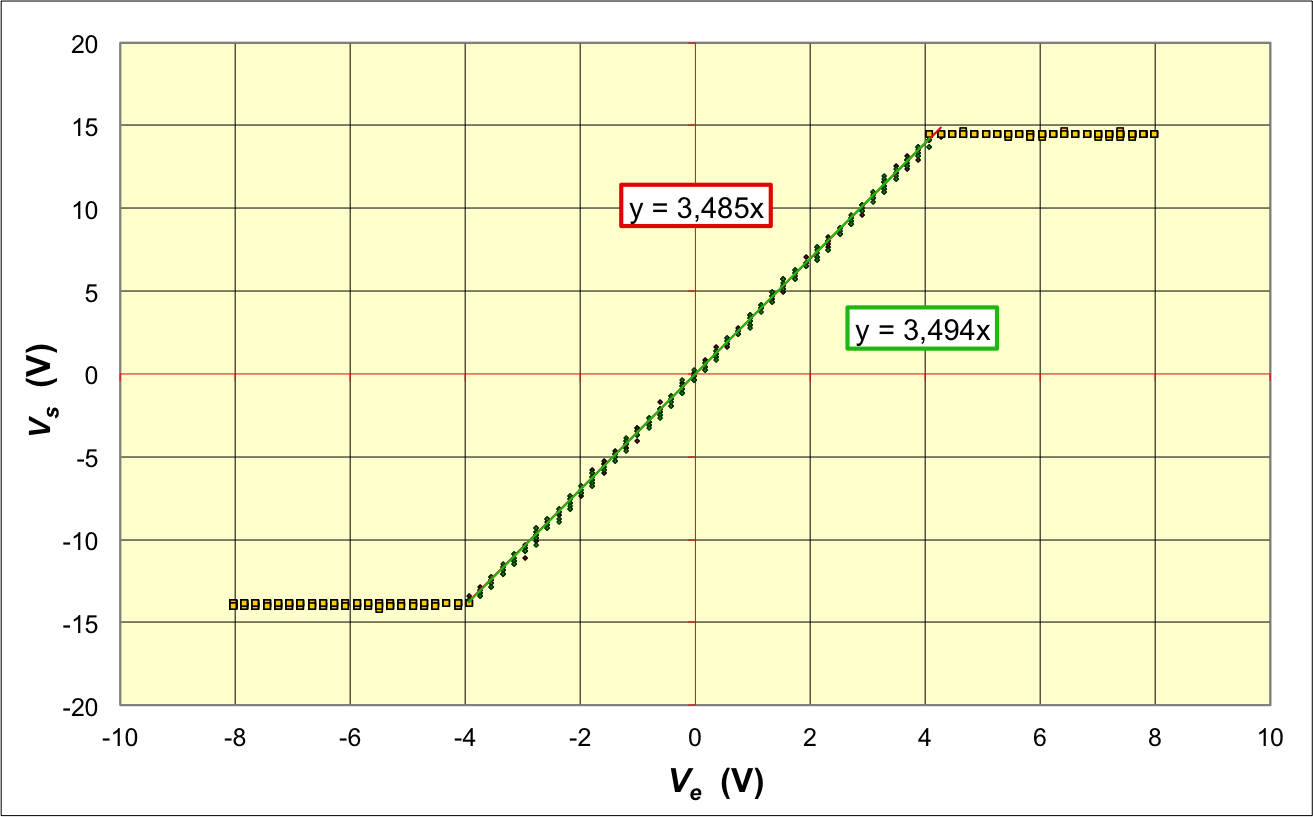
• Les mesures correspondent à une variation linéaire, mais seulement
jusqu'à une limite de saturation.
La pente de la partie linéaire correspond à un gain
; le modèle proposé est tout à fait compatible : .
On peut en effet considérer en mode linéaire :
; or, puisque ,
le branchement en sortie est un pont diviseur de tension
: ; inversement
:
.
• La saturation est observée pour :
; . Ceci est
à comparer aux tensions d'alimentation :
; .
On observe une très légère dissymétrie, mais raisonnablement
compatible avec les incertitudes de mesure.
On constate que la saturation intervient (en valeur absolue)
environ au dessous
de la tension d'alimentation ; ceci donne bien l'ordre de grandeur,
mais montre une dépendance par rapport aux détails des circuits
intégrés des A.O..
3.2. Rétroaction et stabilité du montage
• L’interversion des branchements en et peut
sembler n'avoir aucune importance dans le calcul théorique si on
suppose l’A.O. parfait : on raisonne avec dont
le changement de signe est sans effet.
Au contraire, on vérifie expérimentalement que cette interversion
rend le montage “inopérant” : il ne fonctionne plus selon le mode
“amplificateur non inverseur” mais bascule toujours en saturation.
• En pratique, la “stabilité” des montages avec “rétroaction”
(branchement entre la sortie et une entrée) nécessite d’effectuer la
rétroaction sur l’entrée .
Ceci vient du fait que l'A.O. réel a des caractéristiques moins
simples que l'A.O. idéal ; l'équation obtenue pour le modèle
simplifié correspond en fait à un ”équilibre électrique” stable
pour
; si on intervertit les entrées il y a toujours “équilibre”
pour mais
cela devient un équilibre instable et le moindre signal parasite
conduit à la “déstabilisation” du montage et à la saturation de la
sortie à .
4. Montage “amplificateur inverseur”
4.1. Tracé de la caractéristique
• Les résistances utilisées sont
et
.
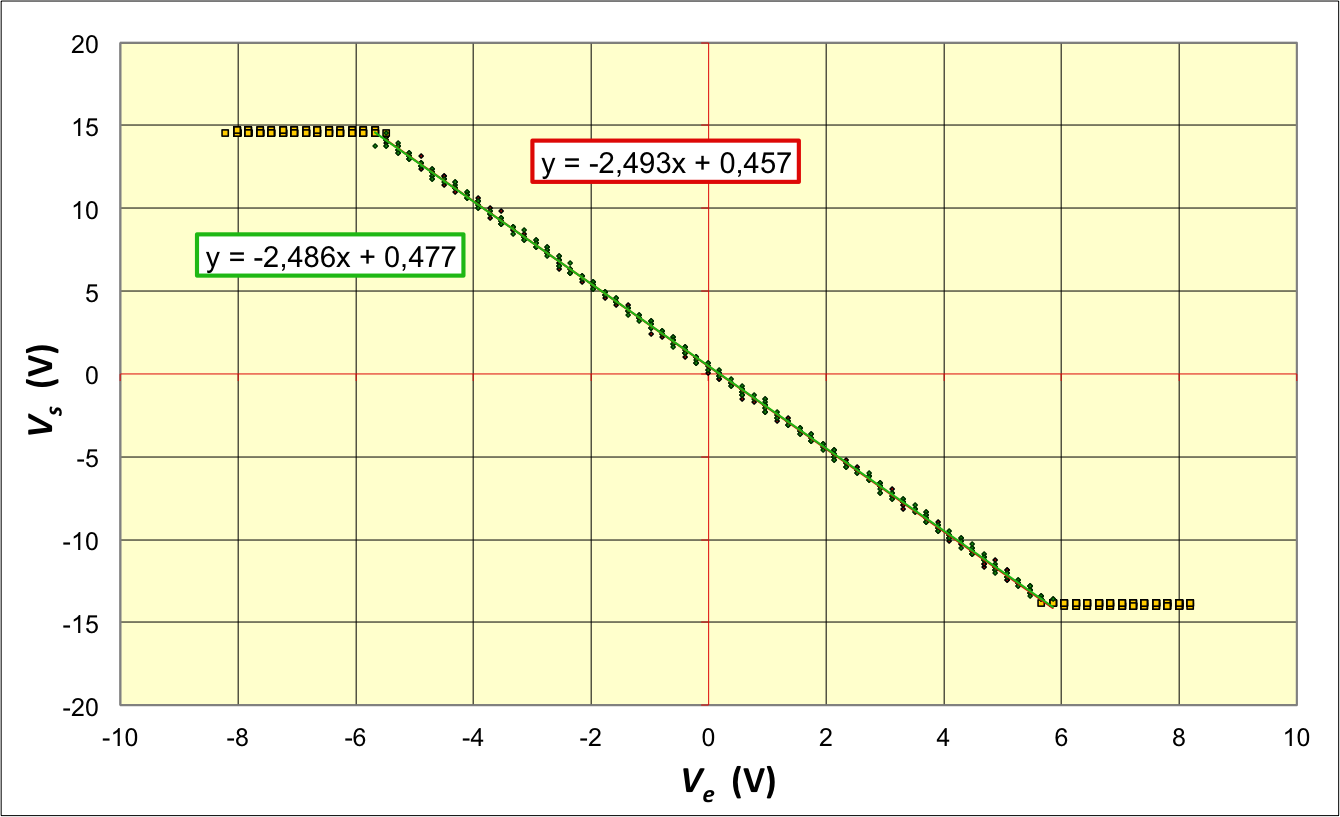
• Les mesures correspondent à une variation linéaire, mais seulement
jusqu'à une limite de saturation.
La pente de la partie linéaire correspond à un gain
; le modèle proposé est tout à fait compatible : .
On peut en effet considérer en mode linéaire :
; or, puisque ,
le branchement entre l'entrée et la sortie est un pont diviseur de
tension : ;
inversement :
.
• On constate par contre ici un décentrage : la partie linéaire est
décalée de ;
puisque le zéro de l'A.O. a été préalablement réglé avec un montage
suiveur de tension, ceci suggère une dissymétrie du circuit intégré
: il aurait été intéressant de tester ce réglage avec un montage
inverseur (pour
; au cas où le zéro se décale quand on change son signe). Cela
montre en fait l'importance de ce type de réglage pour toutes les
utilisations ou un comportement linéaire non décalé est
indispensable.
• La saturation est observée pour :
; . Ceci est
à comparer aux tensions d'alimentation :
; .
On observe une très légère dissymétrie, mais raisonnablement
compatible avec les incertitudes de mesure.
On constate ici encore que la saturation intervient (en valeur
absolue) environ au dessous
de la tension d'alimentation.
4.2. Amélioration à l’aide d’un “suiveur de tension”
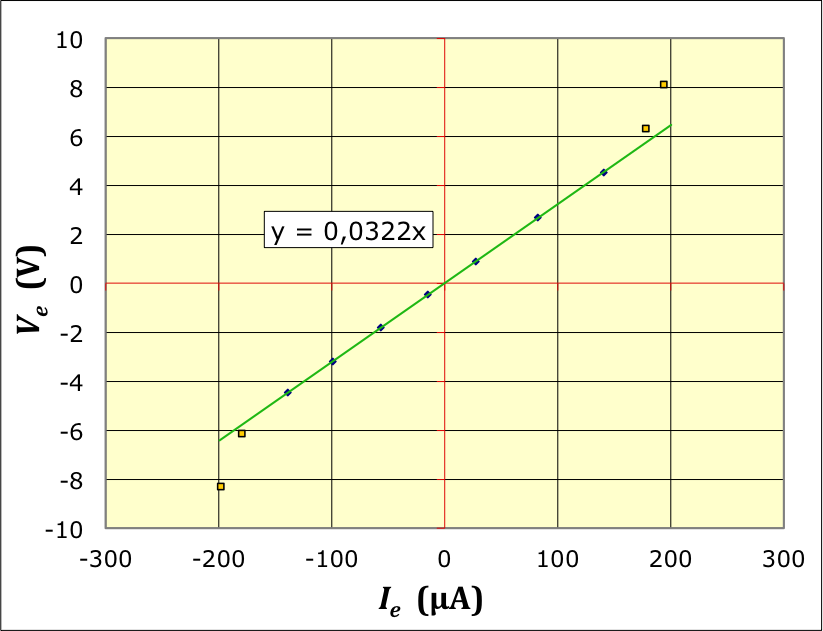
• Les mesures du courant d’entrée en fonction de la tension d'entrée
montrent une parfaite linéarité (hormis pour les points extrêmes,
pour lesquels il y a saturation).
La pente donne la résistance d’entrée :
tout à fait compatible avec .
On peut en effet considérer en mode linéaire :
;
.
• En ajoutant en entrée un “suiveur de tension”, la résistance
d’entrée du montage ainsi modifié est quasi-infinie : le courant
d'entrée est compatible avec zéro ().