AO “IDÉAL” EN MODE LINÉAIRE – corrigé du TP2
2. Montage “sommateur (inverseur)”
2.1. Montage avec signaux continus ou variables
• Pour pouvoir calculer les incertitudes expérimentales causées par les résistances, on considère le cas plus général avec trois résistances différentes.
• D'après la loi de Millman :
V
−
=
V
e
1
R
1
+
V
e
2
R
2
+
V
s
R
1
R
1
+
1
R
2
+
1
R
\displaystyle V_{-}=\frac{\frac{V_{e1}}{R_1} +\frac{V_{e2}}{R_2} +\frac{V_s}{R}}{\frac{1}{R_1} +\frac{1}{R_2} +\frac{1}{R}}
avec
V
−
=
V
+
=
0
V_{-}=V_{+}=0
; par suite :
V
s
=
−
R
.
(
V
e
1
R
1
+
V
e
2
R
2
)
\displaystyle V_s=-R .\left(\frac{V_{e1}}{R_1} +\frac{V_{e2}}{R_2} \right)
.
On obtient donc
V
s
=
−
(
V
e
1
+
V
e
2
)
V_s=-\left(V_{e1}+V_{e2} \right)
pour trois résistances égales.
• Pour le calcul d'incertitudes, les tensions et résistances étant mesurées avec les mêmes appareils, on peut craindre des corrélations ; on choisit donc d'ajouter linéairement les différentes contributions :
∆
V
s
≈
R
.
(
∆
V
e
1
R
1
+
∆
V
e
2
R
2
)
+
∆
R
.
|
V
e
1
R
1
+
V
e
2
R
2
|
+
R
.
(
|
V
e
1
|
R
1
2
∆
R
1
+
|
V
e
2
|
R
2
2
∆
R
2
)
\displaystyle ∆V_s≈R .\left(\frac{∆V_{e1}}{R_1} +\frac{∆V_{e2}}{R_2} \right)+∆R .\left|\frac{V_{e1}}{R_1} +\frac{V_{e2}}{R_2} \right|+R .\left(\frac{\left|V_{e1} \right|}{R_1^{\:2}} \, ∆R_1+\frac{\left|V_{e2} \right|}{R_2^{\:2}} \, ∆R_2 \right)
.
Même si on suppose ensuite les trois résistances “égales” il subsiste un troisième terme associé à leurs incertitudes :
∆
V
s
≈
∆
V
e
1
+
∆
V
e
2
+
∆
R
R
.
(
|
V
e
1
+
V
e
2
|
+
|
V
e
1
|
+
|
V
e
2
|
)
\displaystyle ∆V_s≈∆V_{e1}+∆V_{e2}+\frac{∆R}{R} .\left(\left|V_{e1}+V_{e2} \right|+\left|V_{e1} \right|+\left|V_{e2} \right|\right)
.
• En attente de données fournies par les étudiants...
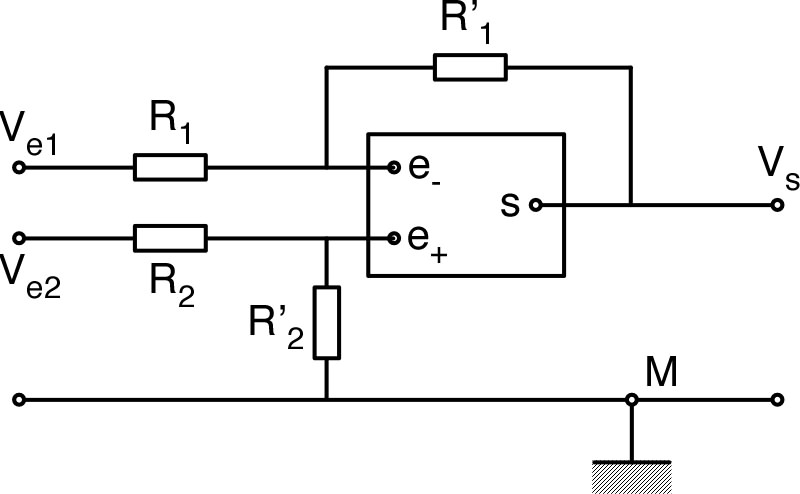
2.2. Variante : montage "soustracteur"
• Pour pouvoir calculer les incertitudes expérimentales causées par les résistances, on considère le cas plus général avec quatre résistances différentes.
• D'après la loi de Millman :
V
−
=
V
e
1
R
1
+
V
s
R
1
′
1
R
1
+
1
R
1
′
\displaystyle V_{-}=\frac{\frac{V_{e1}}{R_1} +\frac{V_s}{R'_1}}{\frac{1}{R_1} +\frac{1}{R'_1}}
et
V
+
=
V
e
2
R
2
1
R
2
+
1
R
2
′
=
V
−
\displaystyle V_{+}=\frac{\frac{V_{e2}}{R_2}}{\frac{1}{R_2} +\frac{1}{R'_2}}=V_{-}
; par suite :
V
s
=
V
e
2
1
+
R
1
′
R
1
1
+
R
2
R
2
′
−
V
e
1
R
1
′
R
1
\displaystyle V_s=V_{e2} \, \frac{1+\frac{R'_1}{R_1}}{1+\frac{R_2}{R'_2}}-V_{e1} \, \frac{R'_1}{R_1}
.
On obtient donc
V
s
=
V
e
2
−
V
e
1
V_s=V_{e2}-V_{e1}
pour toute série de résistances telles que
K
1
=
R
1
′
R
1
=
1
\displaystyle K_1=\frac{R'_1}{R_1} =1
et
K
2
=
R
2
R
2
′
=
1
\displaystyle K_2=\frac{R_2}{R'_2}=1
.
• Pour le calcul des incertitudes sur cette relation théorique, même si on a utilisé des résistances théoriquement égales, il faut tenir compte du fait qu'on a utilisé des résistances expérimentalement différentes (aux incertitudes près).
Ainsi, en propageant les incertitudes dans les expressions avec des résistances différentes, puis en imposant après des résistances égales (pour
K
1
=
K
2
=
1
K_1=K_2=1
) on obtient :
∆
K
1
=
∆
K
2
=
2
∆
R
R
\displaystyle ∆K_1=∆K_2=2 \, \frac{∆R}{R}
.
• Ici encore on choisit donc d'ajouter linéairement les différentes contributions :
∆
V
s
≈
∆
V
e
1
+
∆
V
e
2
+
|
∂
V
s
∂
K
1
|
∆
K
1
+
|
∂
V
s
∂
K
2
|
∆
K
2
\displaystyle ∆V_s≈∆V_{e1}+∆V_{e2}+\left|\frac{∂V_s}{∂K_1}\right| \: ∆K_1+\left|\frac{∂V_s}{∂K_2}\right| \: ∆K_2
;
∆
V
s
≈
∆
V
e
1
+
∆
V
e
2
+
2
∆
R
R
.
(
|
V
e
2
−
V
e
1
|
+
|
V
e
2
|
)
\displaystyle ∆V_s≈∆V_{e1}+∆V_{e2}+2 \, \frac{∆R}{R} .\left(\left|V_{e2}-V_{e1} \right|+\left|V_{e2} \right|\right)
.
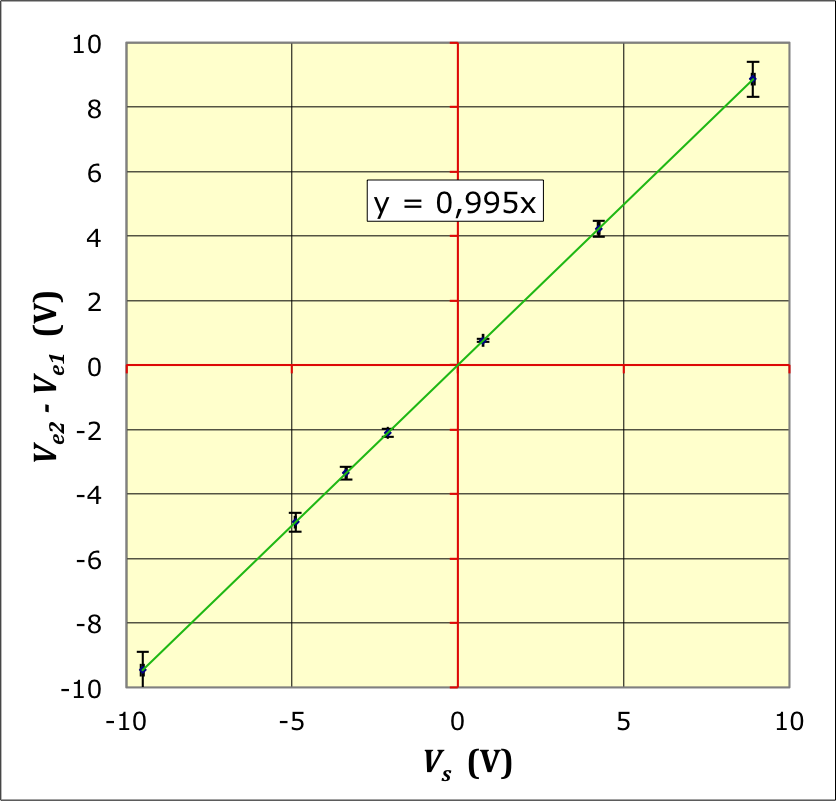
• Des mesures en régime continu ont été effectuée avec des résistances
R
=
470
±
5
Ω
R=470±5 \:\mathrm{Ω}
, pour des couples de tensions
V
e
1
V_{e1}
et
V
e
2
V_{e2}
le plus diverses, réparties dans l'intervalle
±
13
V
±13 \:\mathrm{V}
.
Le modèle théorique est bien compatible avec les mesures (coefficient de proportionnalité
0,995
±
0,023
\text{0,995} \,±\,\text{0,023}
).
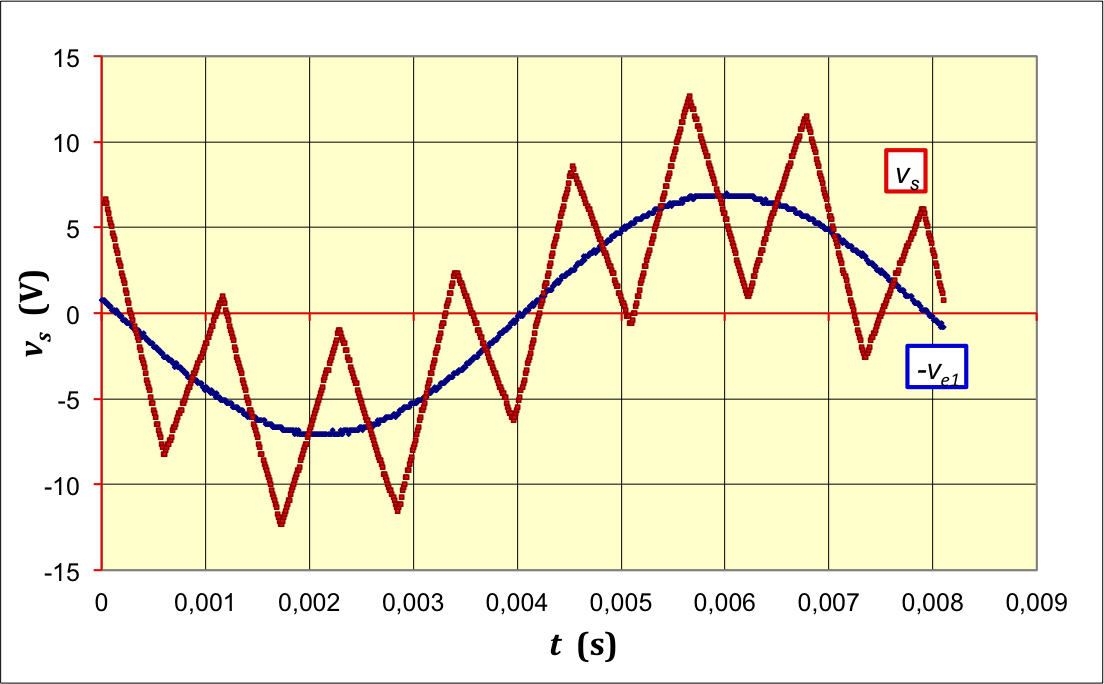
• En régime variable, on substitue une tension
v
e
1
v_{e1}
sinusoïdale à une tension
v
e
2
v_{e2}
en dents de scie.
◊ remarque : l'avantage de la forme des deux signaux étudiés est la compréhension visuelle aisée du fait que la dent de scie
v
e
2
v_{e2}
est ajoutée à la sinusoïde
−
v
e
1
-v_{e1}
.
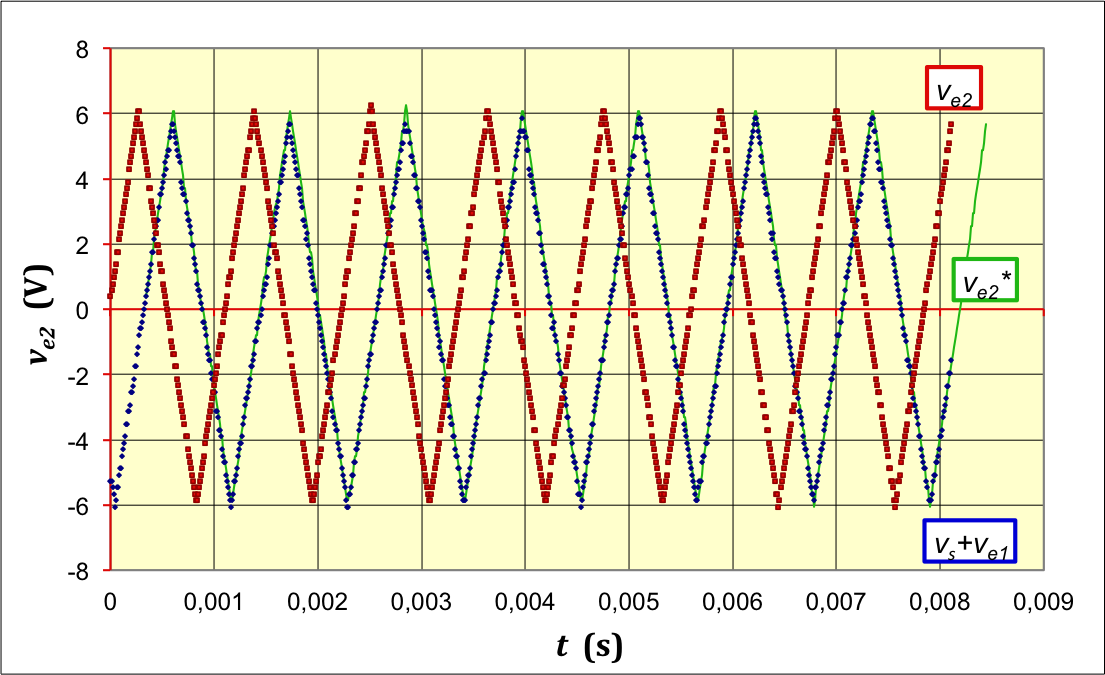
• La mesure de
v
e
2
v_{e2}
montre une compatibilité convaincante avec le signal inversement déduit à partir des deux précédents (on peut ajuster manuellement le décalage de
v
e
2
w
*
v_{e2}^{\phantom{w}*}
pour vérifier la superposition).
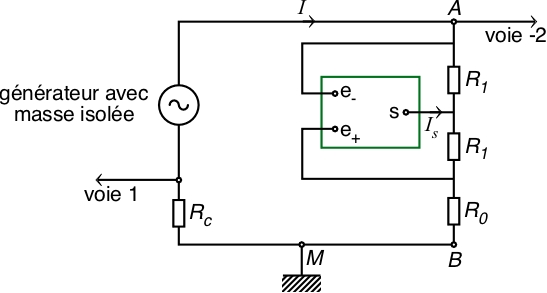
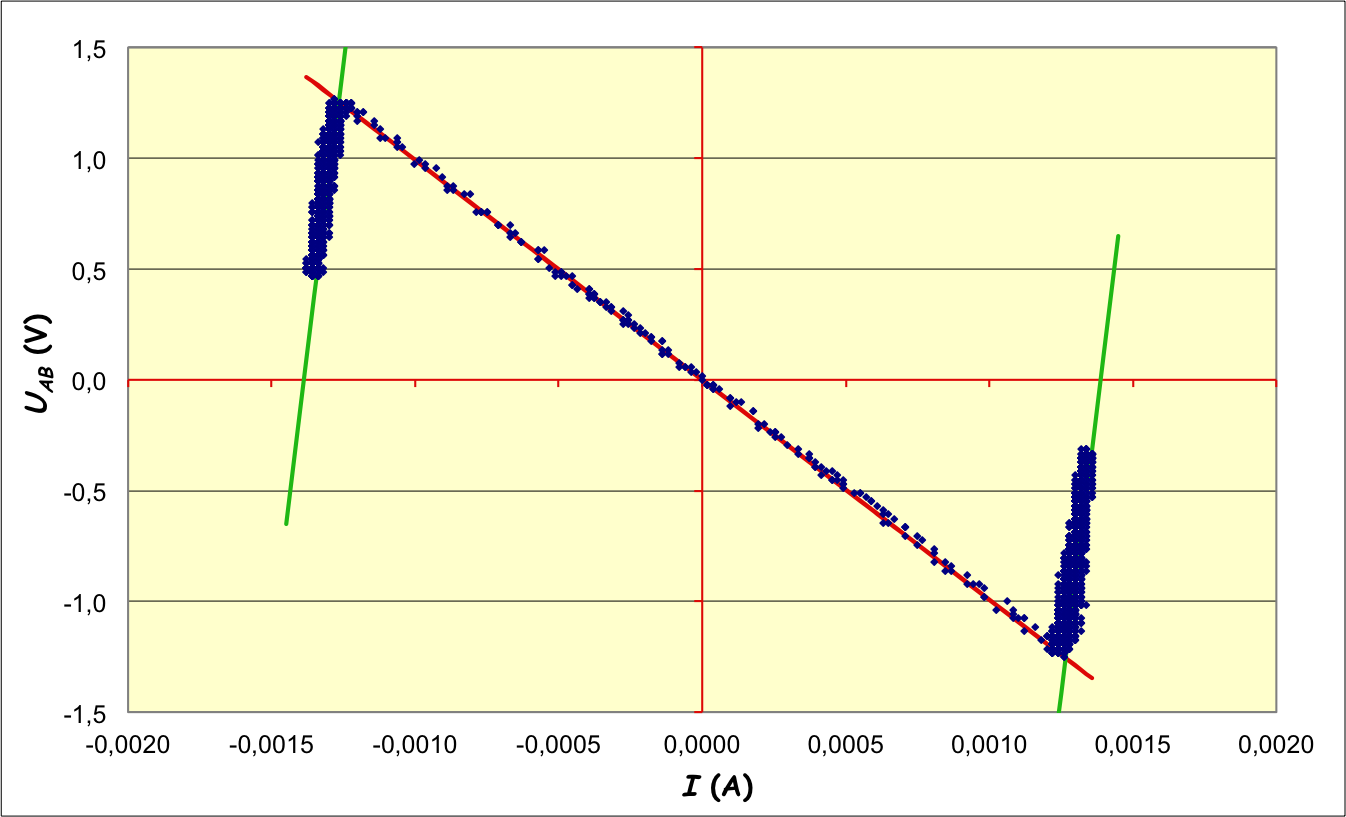
3. Montage “résistance négative”
• En régime linéaire :
V
e
+
=
V
e
−
V_{e_{+}}=V_{e_{-}}
donc
U
A
B
=
R
0
.
(
I
+
I
s
)
U_{AB}=R_0 .\left(I+I_s \right)
et
R
1
I
+
R
1
.
(
I
+
I
s
)
=
0
R_1 \: I+R_1 .\left(I+I_s \right)=0
.
On en déduit :
I
s
=
−
2
I
I_s=-2 \,I
et
U
A
B
=
−
R
0
I
U_{AB}=-R_0 \: I
(comportement en résistance négative, ce qui correspond en fait à une sorte de générateur, par l'action de la sortie de l'A.O.).
• Si on considère que le mode saturé correspond à
V
s
=
±
A
V_s=±A
, l’addition de la tension aux bornes de
R
1
R_1
(du côté du point
A
A
) donne :
U
A
B
=
±
A
+
R
1
I
U_{AB}=±A+R_1 \: I
.
◊ remarque : si on craint une confusion avec le point
A
A
, on peut ici noter la tension d'alimentation
±
A
˜
±\tilde{A}
.
◊ remarque : la résistance de sortie en mode saturé n’est pas nulle mais généralement
ρ
≈
350
Ω
ρ≈350 \:\mathrm{Ω}
, donc
V
s
=
±
A
−
ρ
I
s
V_s=±A-ρ \:I_s
; d’autre part :
V
s
=
(
R
1
+
R
0
)
(
I
+
I
s
)
V_s=(R_1+R_0 )(I+I_s )
donc
I
s
=
±
A
−
(
R
1
+
R
0
)
I
R
1
+
R
0
+
ρ
\displaystyle I_s=\frac{±A-(R_1+R_0 ) \: I}{R_1+R_0+ρ}
ce qui donne
U
A
B
=
±
A
′
+
R
1
′
I
U_{AB}=±A'+R'_1 \: I
en notant
A
′
=
A
R
1
+
R
0
R
1
+
R
0
+
ρ
\displaystyle A'=A \: \frac{R_1+R_0}{R_1+R_0+ρ}
et
R
1
′
=
R
1
+
ρ
R
1
+
R
0
R
1
+
R
0
+
ρ
\displaystyle R'_1=R_1+ρ \: \frac{R_1+R_0}{R_1+R_0+ρ}
; compte tenu de la valeur
ρ
≪
R
1
≈
10
k
Ω
ρ≪R_1≈10 \:\mathrm{kΩ}
, ceci ne correspond toutefois qu’à une correction de
−
3,1
%
-\text{3,1} \,%
sur
A
A
et de
+
3,4
%
+\text{3,4} \,%
sur
R
1
R_1
, ce qui est du même ordre que les incertitudes de mesure (assez grandes pour les portions saturées).
◊ remarque : ici encore, pour des calculs d'incertitudes complets il faudrait raisonner avec deux résistances
R
1
R_1
différentes.
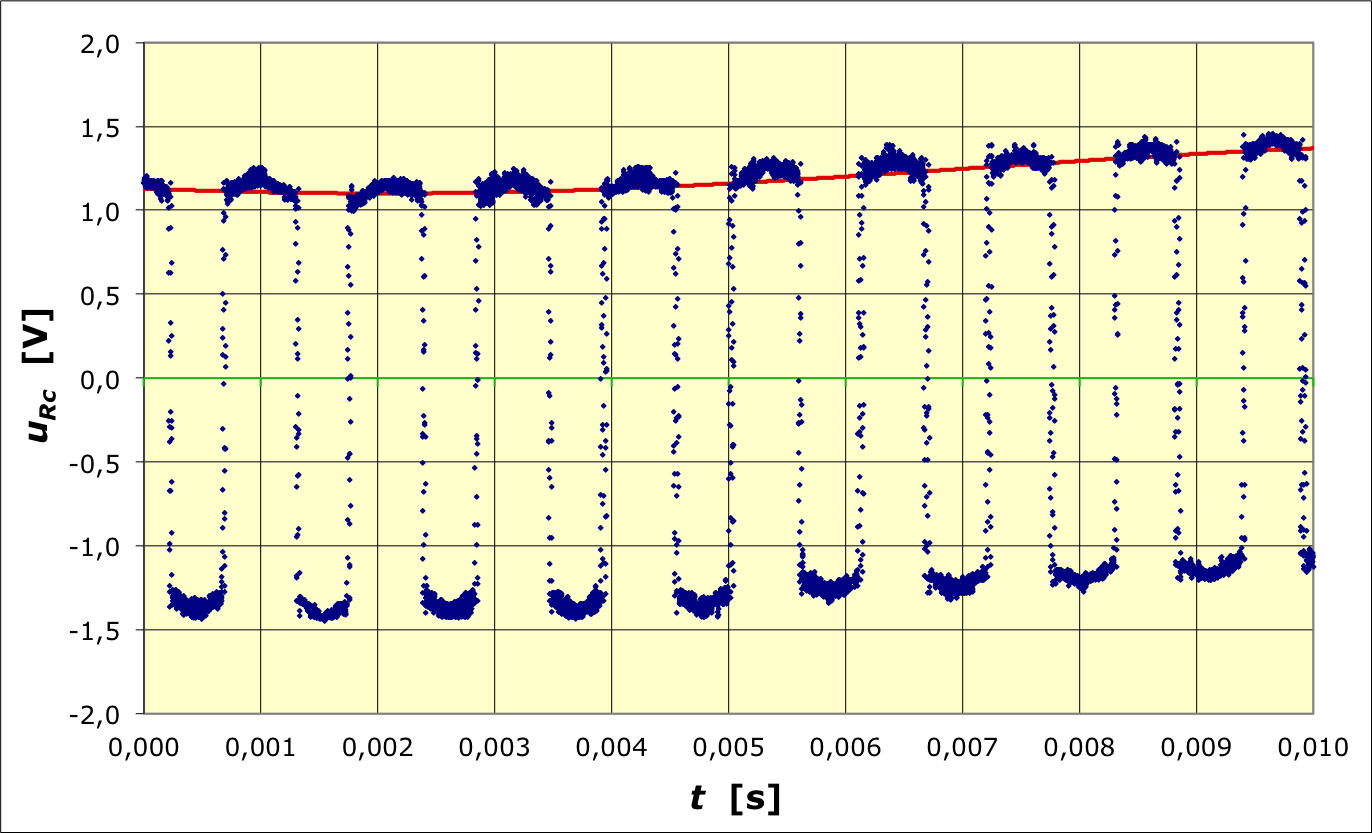
• Le premier montage est réalisé (en régime variable) avec :
R
1
=
10,02
±
0,07
k
Ω
R_1=\text{10,02}±\text{0,07} \:\mathrm{kΩ}
;
R
0
=
992
±
7
Ω
R_0=992±7 \:\mathrm{Ω}
;
R
c
=
1050
±
7
Ω
R_c=1050±7 \:\mathrm{Ω}
. On constate clairement qu'il s'ajoute un important signal parasite d'allure sinusoïdale à
50
H
z
50 \:\mathrm{Hz}
(demi-période de
10
m
s
10 \:\mathrm{ms}
; il faut que cela soit un nombre suffisant de périodes du signal étudié).
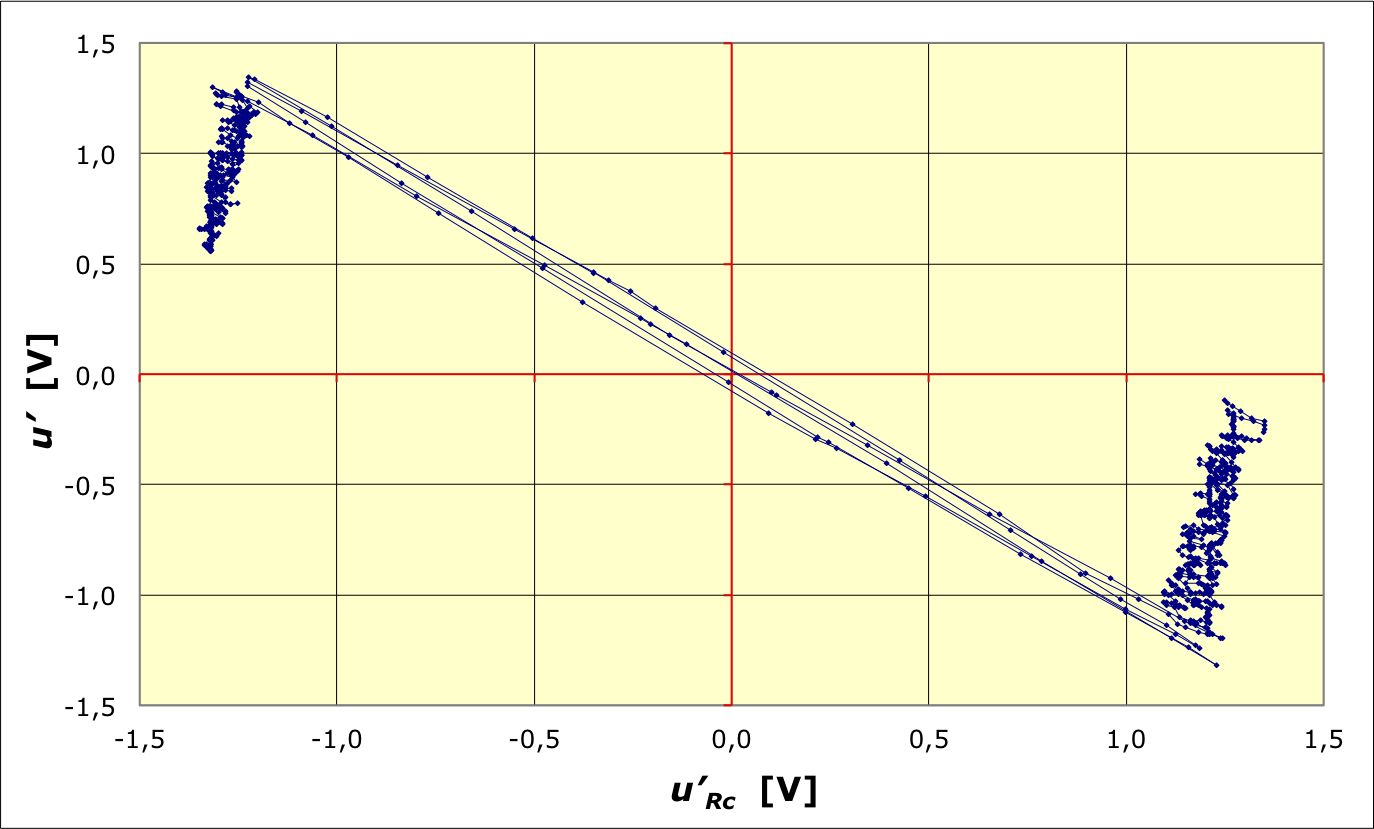
Une première correction très simple consiste à décaler le signal pour compenser la valeur moyenne des parasites ; on obtient l'allure de la caractéristique souhaitée, sur laquelle on constate l'effet très perturbateur des parasites.
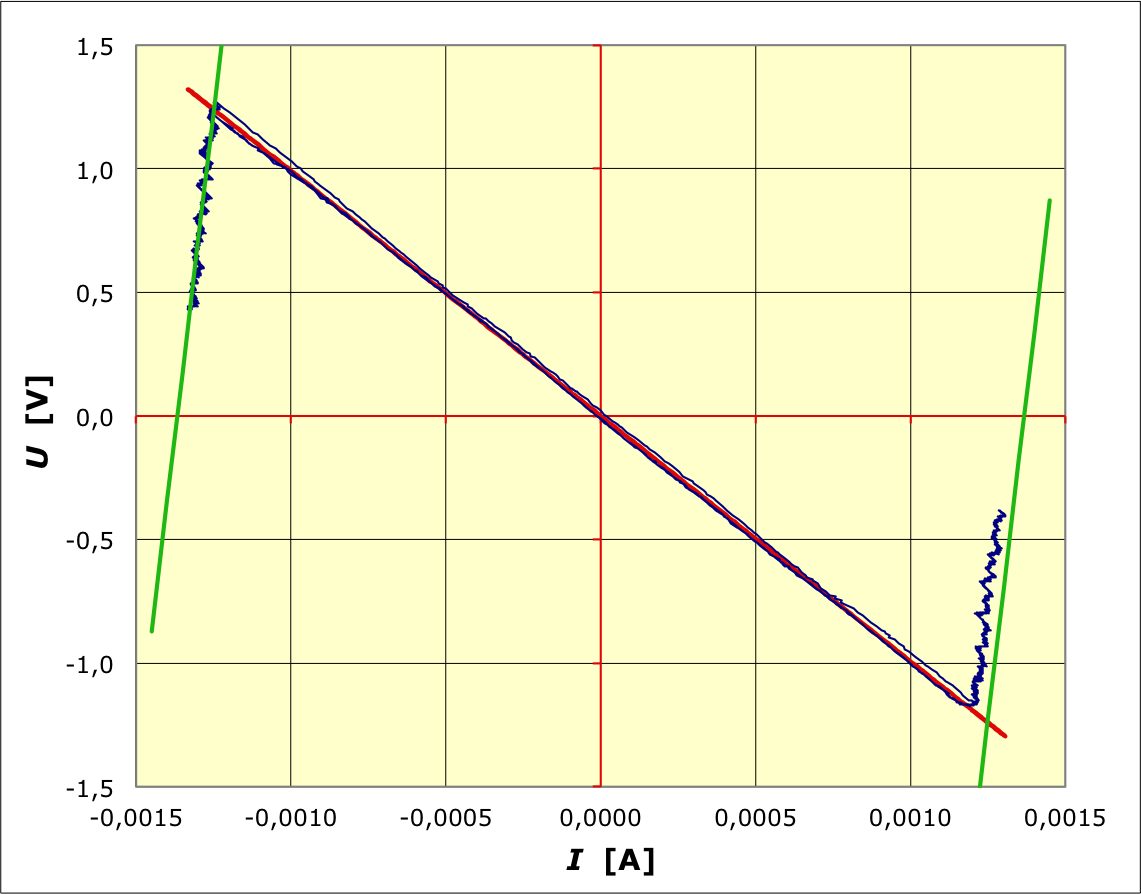
• Sans que cela permette d'éliminer tous les parasites, on peut tout de même ajuster une sinusoïde d'après les portions saturées et la retrancher du signal. Avec ce filtrage simple, on obtient l'allure de la caractéristique souhaitée.
Les mesures sont raisonnablement décrites par la modélisation avec une tension de saturation
A
≈
15
±
1
V
A≈15±1 \:\mathrm{V}
et une résistance de sortie
ρ
≈
500
±
100
Ω
ρ≈500±100 \:\mathrm{Ω}
.
• Le second montage est réalisé (en régime variable) avec :
R
1
=
9,86
±
0,07
k
Ω
R_1=\text{9,86}±\text{0,07} \:\mathrm{kΩ}
;
R
0
=
992
±
7
Ω
R_0=992±7 \:\mathrm{Ω}
;
R
c
=
992
±
7
Ω
R_c=992±7 \:\mathrm{Ω}
. On obtient “directement” un signal nettement moins parasité.
Ici encore, les mesures sont raisonnablement décrites par la modélisation avec une tension de saturation
A
≈
15
±
1
V
A≈15±1 \:\mathrm{V}
et une résistance de sortie
ρ
≈
500
±
100
Ω
ρ≈500±100 \:\mathrm{Ω}
.
• Avec ce montage on peut choisir
R
0
≲
R
c
R_0≲R_c
, bien qu'il fonctionne plus efficacement surtout pour
R
0
≈
R
c
R_0≈R_c
, mais en pratique il est généralement utilisé dans ce dernier cas : le but étant de choisir
R
0
R_0
pour compenser la résistance
R
c
R_c
d'un autre circuit.