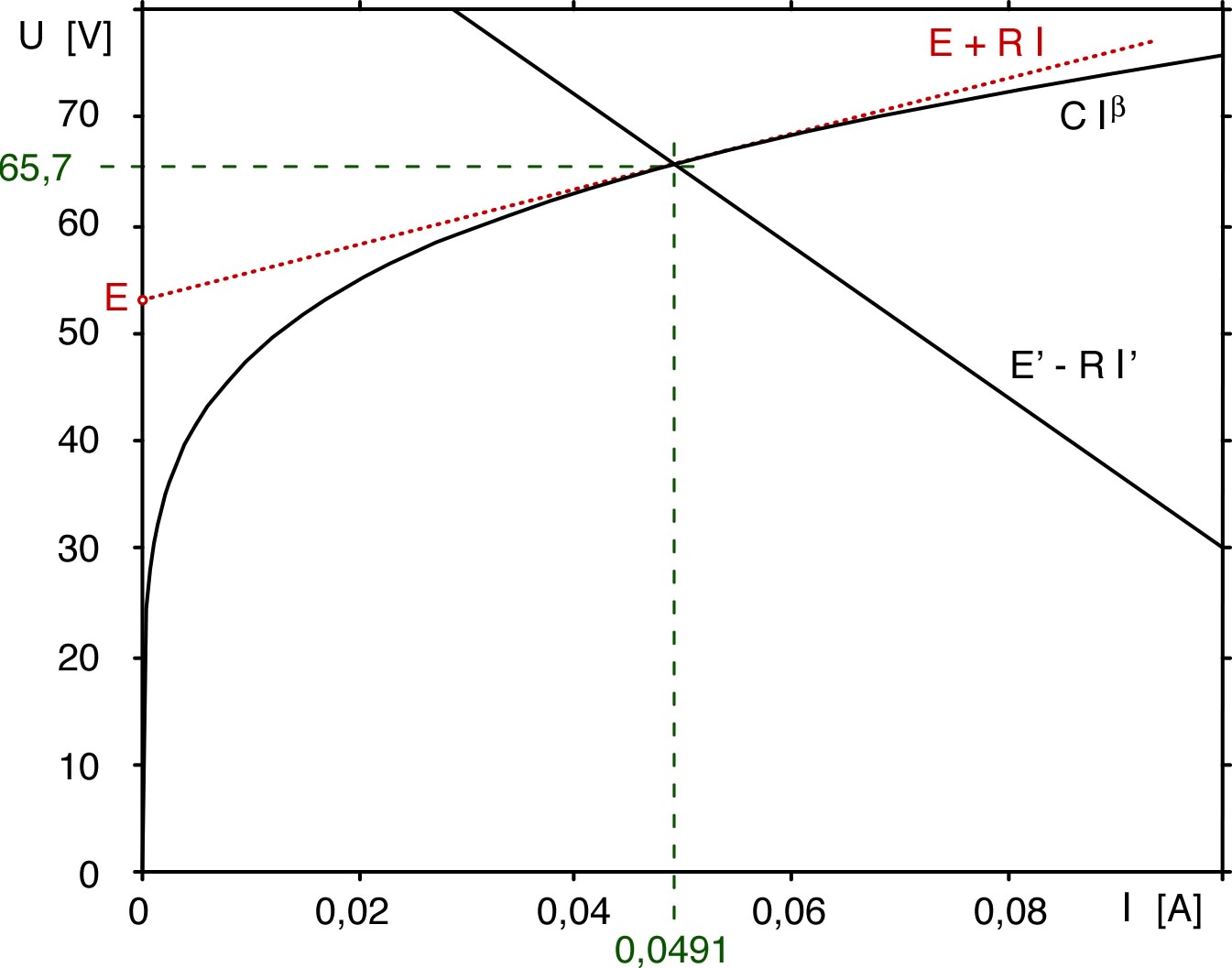
• Le graphique est le suivant :
| 1. | • La puissance dissipée dans le RDT est
:
et la limite en courant est par conséquent : . • Le graphique est le suivant : |
| 2. | • Avec :
, la caractéristique linéarisée peut s’écrire
: . • Ceci correspond à : ; (pour ) ; (pour ). ◊ remarque : vu la forme de la courbe, on peut considérer que cette approximation affine est assez précise dans tout l’intervalle de à . |
| 3.a. | • Le courant de fonctionnement est solution
de l'équation :
.
Cette équation peut être résolue numériquement ; on obtient
:
d'où on déduit :
. ◊ remarque : on peut vérifier que dans ce cas : . |
| 3.b. | • En utilisant la caractéristique linéarisée, le courant de fonctionnement vérifie : d’où on déduit de même : (l’approximation est donc excellente). |
| • La tension aux bornes du générateur est
:
.
Si on suppose que la résistance du voltmètre est très
grande, le courant
lors
de la mesure est négligeable, donc :
. • Lors de la deuxième mesure : donc : et . |
| 1. | • Pour les générateurs en série dans le même
sens, la loi des mailles s’écrit :
; pour les générateurs en série en opposition, la loi
des mailles s’écrit :
(en prenant comme sens positif celui correspondant à
). • On peut en déduire : ; puis : . On obtient ainsi : si on suppose que le courant est dans le sens positif (l’énoncé ne précise pas le sens de mesure) ; on obtient dans le cas contraire () : . |
| 2. | • Faute de connaitre les éventuelles
corrélations entre et
,
l’incertitude sur
peut s’écrire :
(approximation pessimiste). Ceci correspond à une
incertitude relative :
. • L’incertitude relative sur peut s’écrire : (approximation pessimiste) ; mais aucune incertitude n’est indiquée pour . D'après la valeur numérique indiquée (nombre de décimales) pour , on peut supposer (il semble douteux de la négliger) ; ainsi : ; ; . • On obtient donc :
|
| 1. | • Le circuit peut être représenté par le
schéma suivant, où est
la f.c.e.m. du moteur et où la résistance totale du circuit
est
: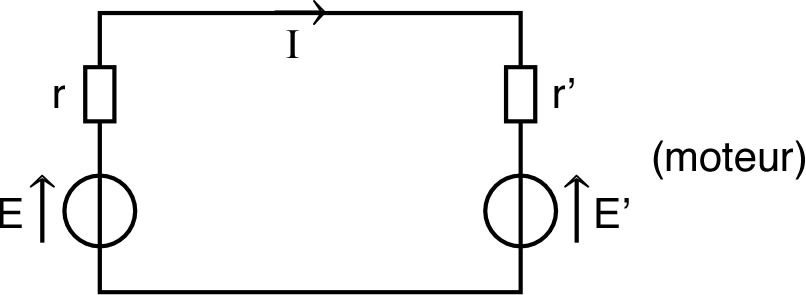 • La puissance mécanique que peut fournir le moteur est celle (électrique) que reçoit : , mais dépend de la vitesse de rotation qui dépend de de façon non évidente : . Par contre, on peut écrire : , expression entièrement définie à partir des données. • La puissance maximale correspond au maximum de en fonction de . La dérivée s'annule pour , donc la puissance maximum est . ◊ remarque : on peut vérifier que ; il s'agit donc bien d'un maximum. |
| 2. | • Le courant
correspondant à :
est solution de l'équation :
, ce qui donne :
. La valeur inférieure correspond à une puissance
mécanique inférieure à
pour cause d'insuffisance d'énergie fournie au moteur ; la
valeur supérieure correspond à une puissance mécanique
inférieure à
pour cause de pertes par effet Joule (si, à partir d'un
régime donné, on freine mécaniquement le moteur, alors sa
f.c.e.m. diminue et
augmente... si cela ne fait pas augmenter la puissance
mécanique, c'est que ça fait augmenter l'effet Joule...). La
condition "normale" d'utilisation correspond donc à
: . ◊ remarque : le courant est : (d'après la loi des mailles) ; or, d'après l'indication de l'énoncé, l'utilisation d'une puissance mécanique inférieure à impose "normalement" supérieure à la valeur correspondant à , donc impose . |
| • Si les cylindres ont une résistance non
négligeable, correspondant à
pour une tranche de longueur
, on
peut modéliser une tranche de câble par une
résistance
“en série” (répartie en deux pour “l’aller” et le “retour”),
associée à une résistance
“en parallèle”. • D’après le schéma, représente la “résistance radiale” d’une tranche de câble de longueur , c’est-à-dire que représente la “résistance radiale” d’une “unité de longueur” de câble. ◊ remarque : du point de vue du courant radial, les tranches d’épaisseur s’ajoutent en parallèle ; par suite la “résistance radiale” est proportionnelle à l’inverse de la longueur. • On peut écrire : ; ceci implique mais aussi : et par conséquent . Par élimination de , on obtient : , ce qui correspond à : (à la fin du calcul, on peut négliger la différence entre et en comparaison de la longueur du câble). • L’intégration de cette équation correspond à : avec ; par suite : . Or le courant doit être nul à l’extrémité libre du câble : ; par suite : ; ; . • La résistance de fuite est donc : . ◊ remarque : dans la limite des petites valeurs de , on obtient : . |
| 1. | • Quand on ferme le circuit, un courant
circule qui provoque la polarisation progressive de
l’électrolyseur ; ceci correspond à l’apparition d’une
f.c.e.m. qui
tend à s’opposer à et à
diminuer le courant. • Si , la polarisation fait tendre vers ; le courant tend alors vers . • Si , la polarisation fait tendre vers ( ne peut pas être dépassée car cela nécessiterait un courant en sens inverse, qui ne peut pas être provoqué par le générateur) ; le courant tend alors vers . |
| 2. | • La loi des mailles donne :
, donc pour en déduire une équation sur il
faut exprimer en
fonction de
.
L’énoncé indique :
, d’où on déduit :
et
. On obtient donc :
c’est-à-dire : . • En décomposant en fonction de : on obtient alors : et donc : . • Ceci s’intègre sous la forme : avec et où est une constante d'intégration. D'après les conditions initiales : et on obtient : . • Il apparaît alors que : et (en supposant , il faudrait ). Par suite la quantité ne change pas de signe ; puisqu’elle vaut initialement elle reste toujours positive. On obtient donc : et finalement : . • Si , alors et tend vers avec un courant limite : . • Si , alors et tend vers avec un courant limite : . ◊ remarque : on retrouve bien ainsi la caractéristique usuelle (affine par morceaux) de l’électrolyseur. |