RÉGIME SINUSOÏDAL ; IMPÉDANCES - mesures et commentaires du TP1
1. Principe
• Les dipôles électrocinétiques étudiés ne sont décrits qu'en
première approximation par les modèles proposés. La modélisation a
généralement des limites de validité ; une étude expérimentale
permet souvent d'en prendre conscience.
2. Manipulation
2.1. Réglages préalables
• Les appareils électroniques modernes ont l'avantage d'être
automatisés, mais quel que soit le niveau de progrès technique, il
est indispensable de bien en comprendre le fonctionnement, quitte
même à débrayer certains automatismes pour mieux contrôler
manuellement.
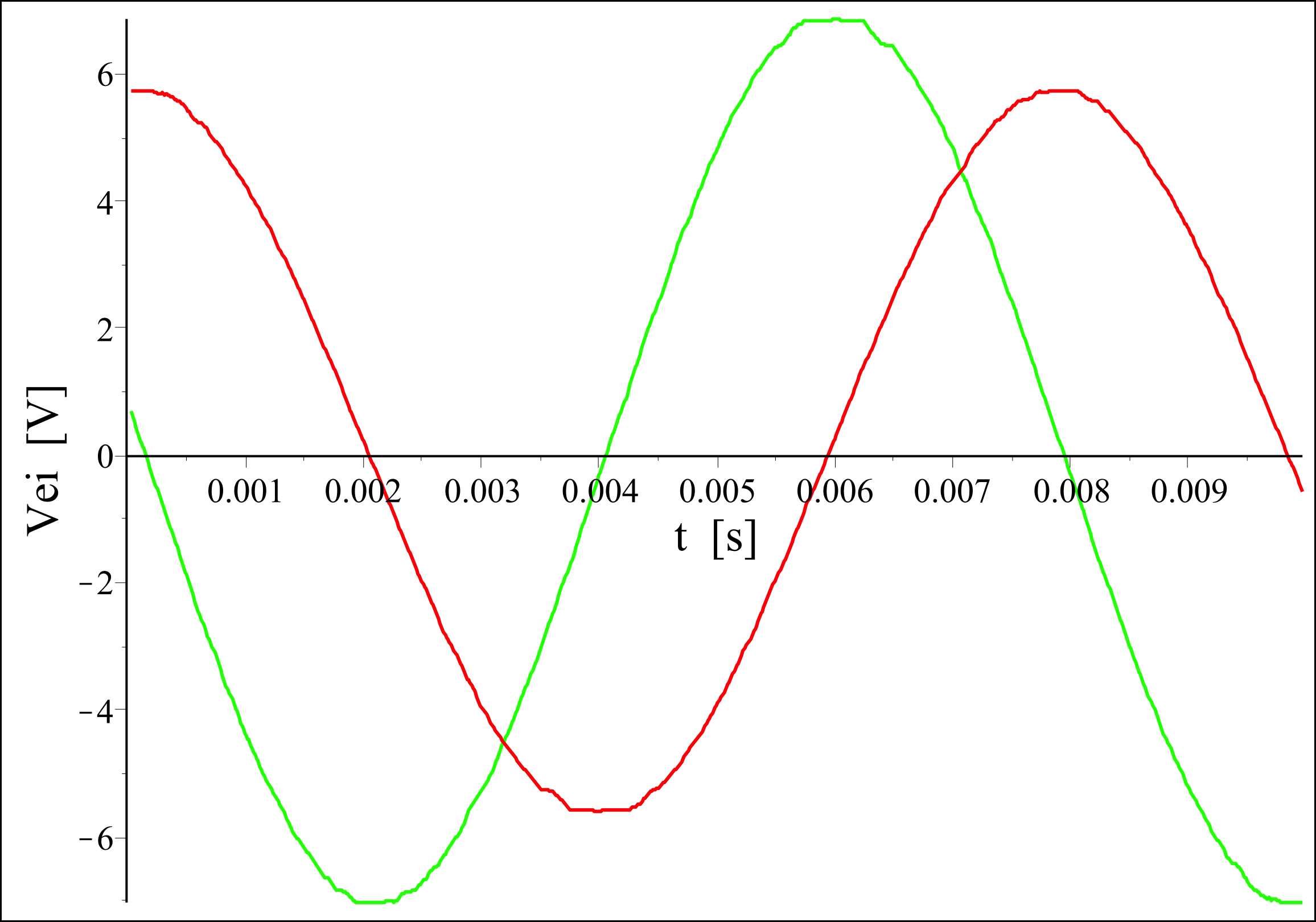
2.2. Mesure des déphasages
• Outre l'utilisation des écrans d'oscilloscopes pour contrôler
l'allure correcte ou non des mesures, on peut transférer les mesures
aux ordinateurs pour une analyse informatique. De nombreux logiciels
permettent ce genre d'étude.
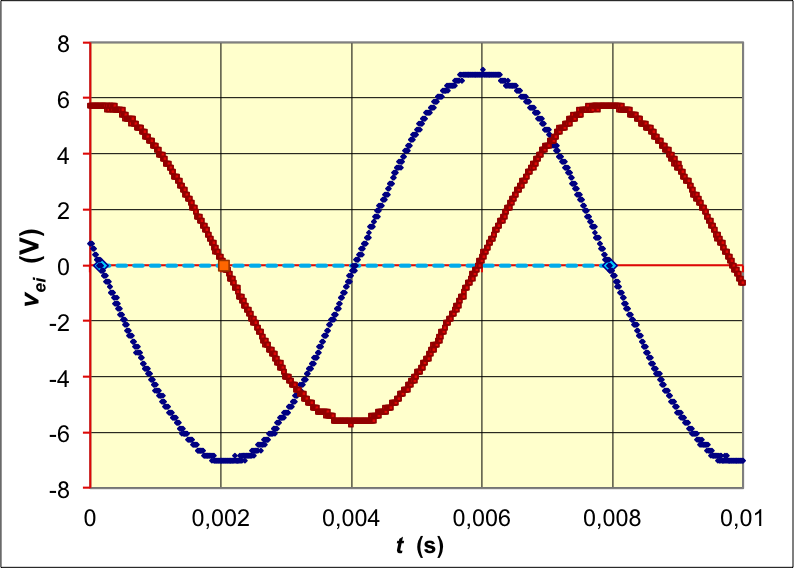
• Ce qui est intéressant ici, c'est la programmation (TP
d'informatique) tentant de simuler la détection et la mesure
automatique d'un déphasage par le logiciel interne d'un phasemètre
numérique (une avec Maple et une autre avec Excel ; cela aurait pu
être Python). Pour les mesures du TP, on se limite évidemment à
utiliser un phasemètre.
Le logiciel peut être amené à effectuer un lissage modéré avant
d'analyser les signaux, par exemple par moyenne “locale”
(remplacement de chaque mesure par une moyenne pondérée avec les
mesures voisines).
Le logiciel peut ensuite détecter le minimum et le maximum, puis
chercher les passages par la moyenne. Détectant le sens de variation
lors des passages, il peut repérer la périodicité sur chacun des
deux signaux, en vérifier la compatibilité, puis calculer le
décalage en proportion d'une période ; de nombreuses méthodes
peuvent être utilisées pour programmer cela.
L'exemple Maple calcule
puis
(
).
L'exemple Excel calcule
puis
(
).
◊ remarque : on pourrait aussi programmer pour vérifier que la
période détectée se reproduit effectivement.
• Une autre démarche consiste à effectuer un ajustement (séparé ou
global) de deux sinusoïdes (ce qui privilégie cette forme de
signaux) et de leur déphasage.
L'exemple Maple calcule une période
(mais en supposant que la forme est effectivement sinusoïdale) puis
un déphasage
(
).
L'exemple Excel calcule une période
(mais en supposant que la forme est effectivement sinusoïdale) puis
un déphasage
(
).
La précision apparente apportée par la contrainte sinusoïdale doit
ici être surveillée, car il est peu probable que les signaux soient
totalement exempts de parasites : le supposer peut introduire de
fait une cause d'incertitudes systématiques.
◊ remarque : à part pour les déphasages faibles, pour lesquels les
phasemètres ont souvent une précision relative modeste, la lecture
sur l'écran de l'oscilloscope est généralement moins précise et ne
sert que pour contrôler si les mesures affichées par le phasemètre
sont plausibles.
2.3. Circuit RC
• Le montage est réalisé avec un résistor de résistance et un
condensateur de capacité
.
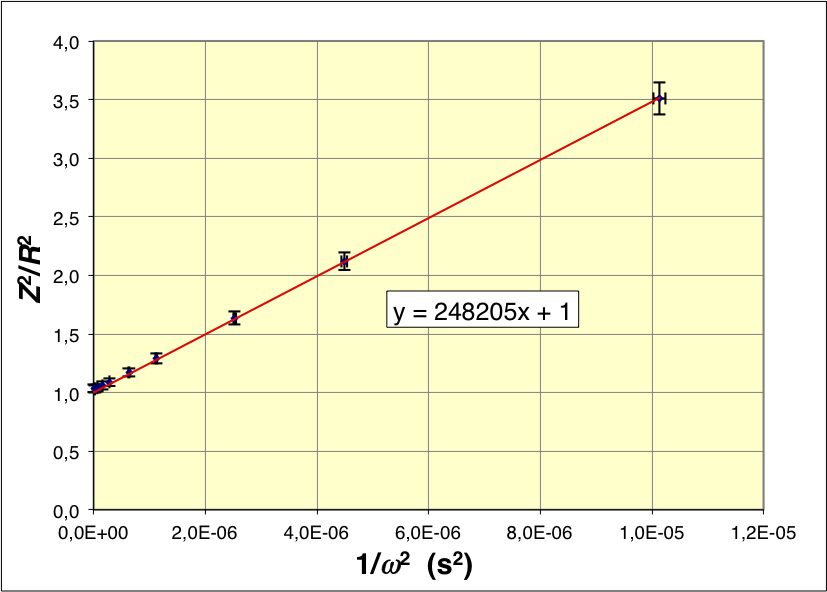
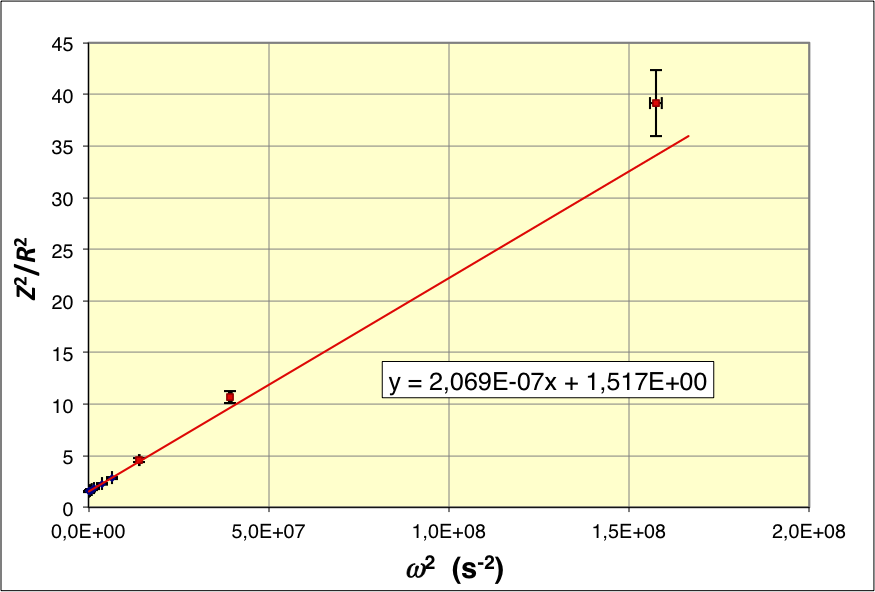
• Les mesures obtenues donnent une représentation affine conforme à
la relation
.
La pente correspond à
tout à fait compatible avec les valeurs préalablement mesurées
:
.
Inversement, si on suppose connue la résistance (c'est le cas pour
celle contenue dans le circuit de mesure d'un capacimètre), on peut
en déduire la valeur de la capacité :
.
◊ remarque : pour estimer rapidement les incertitudes de mesure,
voir le chapitre annexe décrivant les méthodes correspondantes (mais
on peut aussi utiliser un logiciel spécialisé).
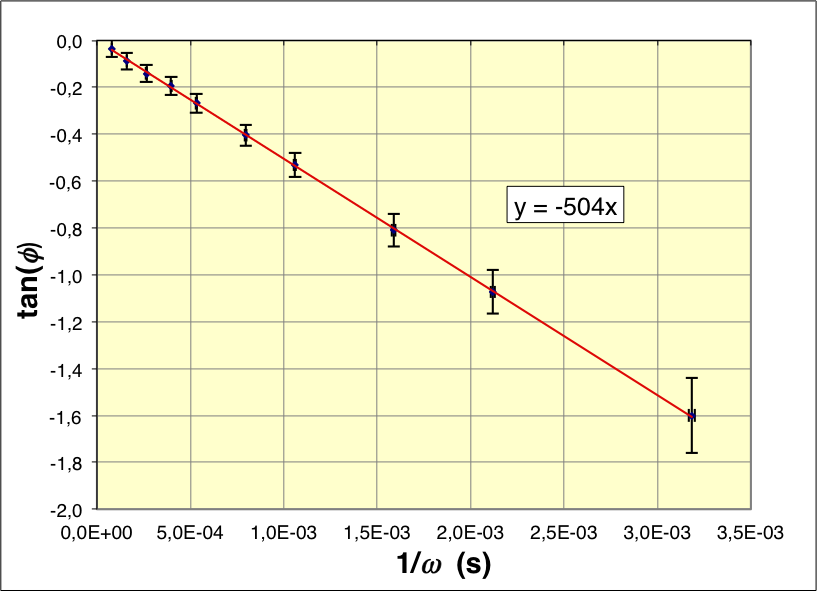
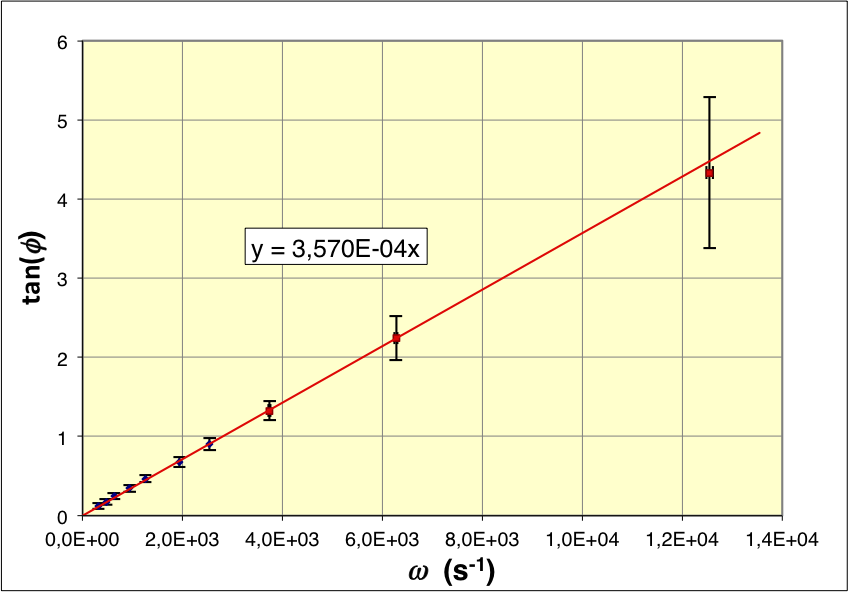
• On obtient également une représentation linéaire conforme à la
relation .
La pente correspond à
tout à fait compatible avec les valeurs préalablement mesurées
:
.
Inversement, si on suppose connue la résistance, on en déduit la
valeur de la capacité :
. Ce résultat est toutefois moins précis que celui obtenu par
la première méthode.
• La valeur indiquée sur le condensateur ()
n'est qu'approximative () ; il
faut généralement effectuer une mesure précise. Le circuit étudié
ici donne des mesures de précision comparable à celle obtenue avec
les circuits intégrés au capacimètre.
2.4. Circuit RL
• Le montage est réalisé avec un résistor de résistance et une
bobine d'inductance
et de résistance .
◊ remarque : il faut éviter les mesures à trop grande fréquence
car et dépendent
alors de .
• Les mesures obtenues donnent une représentation affine conforme à
la relation .
L'ordonnée à l'origine correspond à
tout à fait compatible avec les valeurs préalablement mesurées
:
.
Inversement, si on suppose connue la résistance (c'est le cas
pour celle contenue dans le circuit de mesure d'un inductancemètre),
on peut en déduire la valeur de la résistance pour la bobine
: . Ce
résultat peu précis n'est souvent pas utilisé par l'inductancemètre.
La pente correspond à tout à fait
compatible avec les valeurs préalablement mesurées : .
Inversement, supposant connue la résistance, on en déduit la valeur
de l'inductance :
.
• On obtient également une représentation linéaire conforme à la
relation .
La pente correspond à tout à fait
compatible avec les valeurs préalablement mesurées : .
Par contre, cette relation dépend à la fois de et
, donc elle ne
peut pas servir à elle seule pour déterminer ces deux quantités.
• Les valeurs indiquées sur la bobine (
;
) ne sont
qu'approximatives () ; il
faut généralement effectuer des mesures précises. Le circuit étudié
ici donne pour des mesures
de précision comparable à celle obtenue avec les circuits intégrés à
l'inductancemètre ; par contre pour les mesures
sont généralement plus précises avec un ohm-mètre.