• La force de Lorentz est perpendiculaire à , donc à ; par suite et est constante.
• La force est aussi perpendiculaire à , donc elle ne travaille pas et est constante. Par suite est constant, ainsi : est aussi constante.
• L’accélération a donc une norme constante ; or, pour un mouvement dont la vitesse à une norme constante, la norme de l'accélération est liée au rayon de courbure local par la relation , donc le rayon de courbure est lui aussi constant.
• Puisque est constant, la projection de la courbe sur a une courbure constante : c’est donc un cercle de rayon tel que , c’est-à-dire .
| • Ce cercle est parcouru par la projection de avec une “vitesse projetée” constante : ; ce qui correspond à une vitesse angulaire : . La rotation se fait autour de la direction de avec le sens qui a le signe de ; la trajectoire est une hélice de pas constant . | 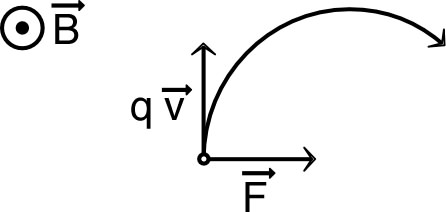 |
• Par comparaison avec les conditions initiales sur la vitesse, on obtient respectivement ou et ( si ; si ), ce qui donne .
• Par comparaison avec les conditions initiales sur la position, on obtient et , c’est-à-dire : et .