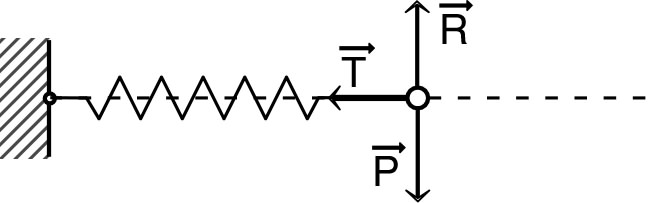
• On considère un oscillateur à ressort horizontal sans frottement.
La réaction normale
du support compense le poids
(mouvement horizontal).
• En choisissant comme origine la position d'équilibre, on en
déduit l’équation différentielle :
; ce qui peut encore s’écrire :
avec la pulsation
.
• On considère un point matériel dont l’énergie potentielle
dépend d’une variable de position
.
Pour les cas “usuels”, on peut montrer qu'au voisinage de
“toute” position il est
possible d'exprimer l'énergie potentielle sous forme d'un
développement en série, donc les termes sont de plus en plus
petits si est
petit :
Une position d’équilibre stable en
correspond à un minimum de ; ainsi
au voisinage d’une position d’équilibre stable :
où le coefficient
est nommé “raideur” de l’oscillateur.
• Le point est soumis à une force “de rappel” de coordonnée
(algébrique) :
(correspondant à la loi de Hooke).
En prenant pour simplifier l'origine à la position
d'équilibre (),
le mouvement au voisinage de l'équilibre est décrit par l’équation
:
avec la pulsation
.
◊ remarque : le raisonnement peut se généraliser à des cas où la
variable n'est pas
une longueur (variable angulaire, électrique...).
• Les solutions de :
sont de la forme :
où l'amplitude et le
“déphasage” (ou “phase initiale”) sont des
constantes d’intégration déterminées par les “conditions aux
limites”.
Par exemple si on impose des conditions initiales
et
:
;
;
.
◊ remarque : on peut aussi utiliser :
; les conditions initiales imposent alors :
et
.
◊ remarque : pour une équation différentielle linéaire, toute
combinaison linéaire de solutions et/ou de leurs dérivées est
aussi solution.
• La période
ne dépend pas de l’amplitude des oscillations tant que celle-ci
est assez faible pour qu’on puisse négliger les termes supérieurs
du développement de
(propriété d’isochronisme des “petites” oscillations).
• L’énergie cinétique est :
; l’énergie potentielle peut s'écrire :
; on retrouve ainsi que est
constante.
On peut aussi écrire plus généralement :
.
• Les variations d'un signal de la forme :
peuvent être représentées à l'aide d'un vecteur
de norme tournant
à la vitesse angulaire
.
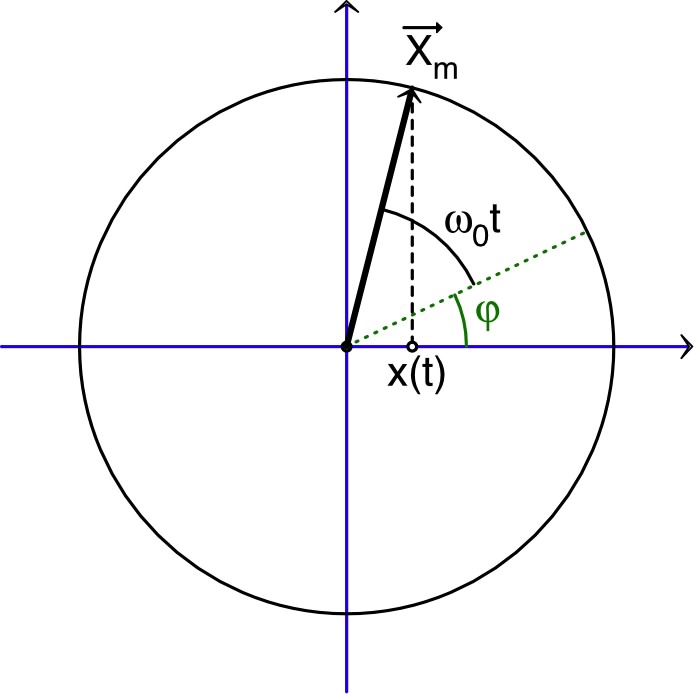
◊ remarque : le vecteur dérivé, tourné de
, représente aussi le signal dérivé :
.
◊ remarque : cela peut donc aussi être noté à l'aide des nombres
complexes ; la projection horizontale correspond à la partie
réelle.
📖 exercices n° I, II, III
• On peut montrer que “tout” signal périodique “centré” de
fréquence peut être
décomposé (équivalent à) une superposition de signaux sinusoïdaux
de fréquences
,
avec
(“série de Fourier”).
La fréquence est appelée
“fondamentale” et les autres “harmoniques”. La répartition des
amplitudes des composantes est appelée “spectre de Fourier”.
◊ remarque : ceci se généralise pour les signaux non
périodiques, en superposant des sinusoïdes de toutes les
fréquences (“transformée de Fourier”).
• Dans de nombreuses circonstances (au moins pour les faibles
amplitudes), le comportement des signaux est décrit par des
équations différentielles linéaires. La connaissance du
comportement des composantes sinusoïdales de Fourier suffit donc à
connaître celui d'un signal quelconque.
• Les ordres de grandeur usuels dépendent des types de signaux :
| ◊ 1 à 10 Hz pour les ondes sismiques ; | |
| ◊ 20 à 20000 Hz pour les ondes sonores (audibles) ; | |
| ◊ 400 à 800 THz (1012 Hz) pour les ondes lumineuses (visibles). |