a→=a→T+a→N\overset{→}{a}=\overset{→}{a}_T+\overset{→}{a}_N avec : a¯T=s̈=v¯˙\widebar{a}_T=\ddot{s}=\dot{\widebar{v}} et aN=v2R\displaystyle a_N=\frac{v^2}{R} .
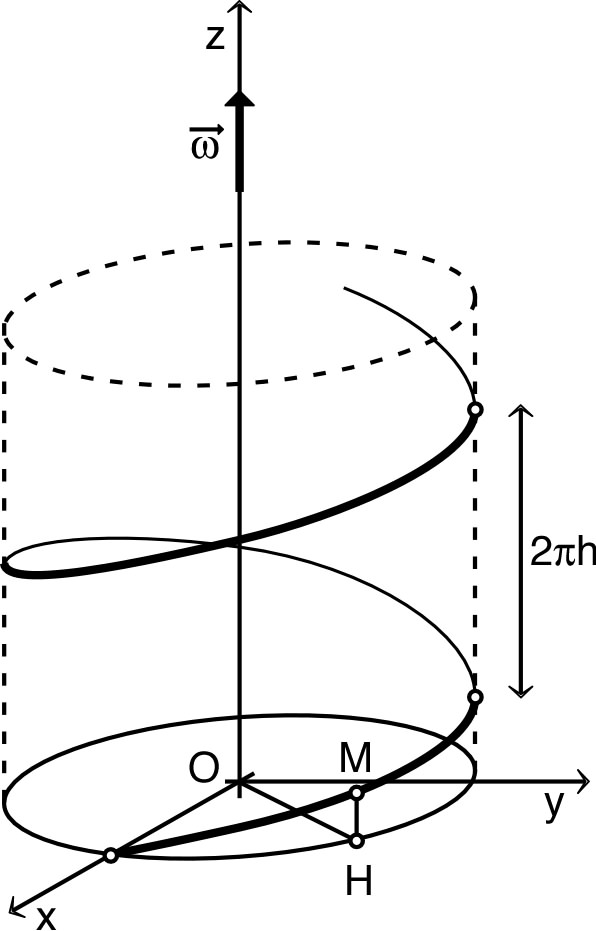
OM⟶=ru→r(θ)+zu→z\overset{⟶}{OM}=r \:\overset{→}{u}_r (θ)+z \:\overset{→}{u}_z ; θ=θ(t)θ=θ(t) et z=hθ(t)z=h \:θ(t) .
v→=rθ˙u→θ+hθ˙u→z\overset{→}{v}=r \:\dot{θ} \: \overset{→}{u}_θ+h \:\dot{θ} \: \overset{→}{u}_z ; a→=rθ̈u→θ−rθ˙2u→r+hθ̈u→z\overset{→}{a}=r \:\ddot{θ} \:\overset{→}{u}_θ-r \:\dot{θ}^2 \: \overset{→}{u}_r+h \:\ddot{θ} \: \overset{→}{u}_z .
ds=r2+h2dθds=\sqrt{r^2+h^2\,} \:\, dθ ; T→=v→s˙=ru→θ+hu→zr2+h2\displaystyle \overset{→}{T}=\frac{\overset{→}{v}}{\dot{s}} =\frac{r \:\overset{→}{u}_θ+h \:\overset{→}{u}_z}{\sqrt{r^2+h^2\,}} .
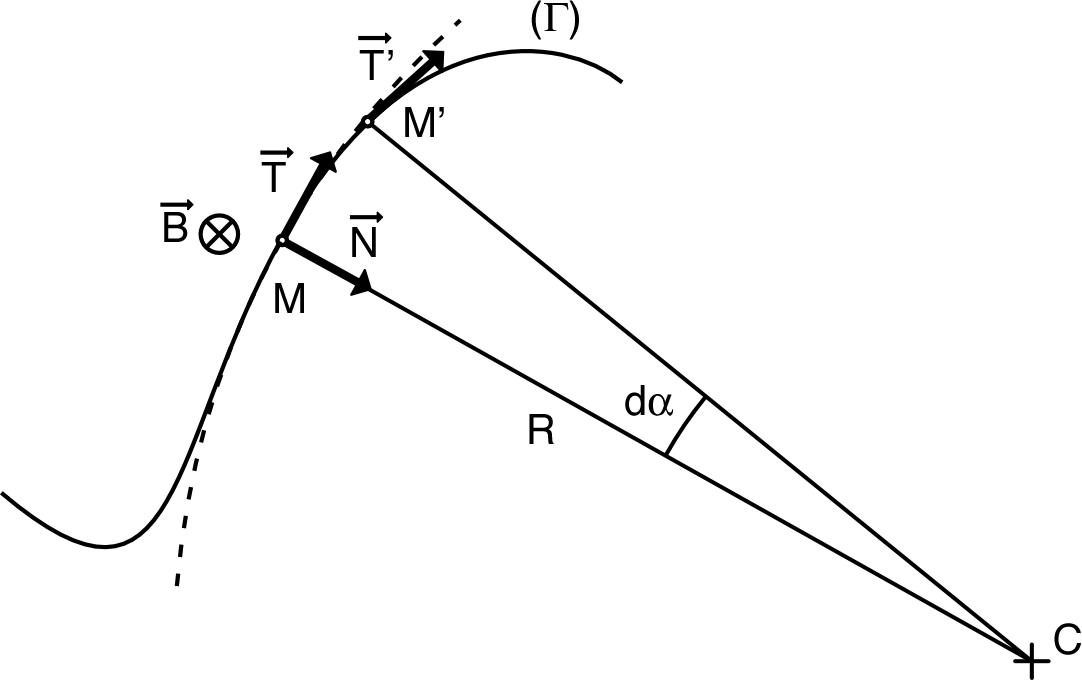
T→0=ru→y+hu→zr2+h2\displaystyle \overset{→}{T}_0=\frac{r \:\overset{→}{u}_y+h \:\overset{→}{u}_z}{\sqrt{r^2+h^2\,}} ; T→∙T→0≈cos(α)≈r2cos(θ)+h2r2+h2\displaystyle \overset{→}{T}∙\overset{→}{T}_0≈\cos(α)≈\frac{r^2 \: \cos(θ)+h^2}{r^2+h^2} ; 1−α22≈r2r2+h2(1−θ22)+h2r2+h2\displaystyle 1-\frac{α^2}{2}≈\frac{r^2}{r^2+h^2} \: \left(1-\frac{θ^2}{2}\right)+\frac{h^2}{r^2+h^2} ; α=rr2+h2θ\displaystyle α=\frac{r}{\sqrt{r^2+h^2\,}} \; θ ; R=dsdα=r2+h2r>r\displaystyle R=\frac{ds}{dα}=\frac{r^2+h^2}{r}>r .
v→=RΩT→\overset{→}{v}= R \:Ω \:\overset{→}{T} ; a→=RΩ˙T→+RΩ2N→\overset{→}{a}=R \:\dot{Ω} \: \overset{→}{T}+R \:Ω^2 \: \overset{→}{N} .