• Les coordonnées du vecteur
vitesse peuvent s’obtenir symboliquement en dérivant
par rapport à
:; .◊ remarque : ceci ne détermine pas la façon dont est parcourue la trajectoire car on ne connaît pas . • D’après l’énoncé, a pour coordonnées : ;donc et décrit un cercle de centre et de rayon . • Le vecteur a pour coordonnées : et l’orthogonalité au vecteur vitesse se déduit du produit scalaire : . |
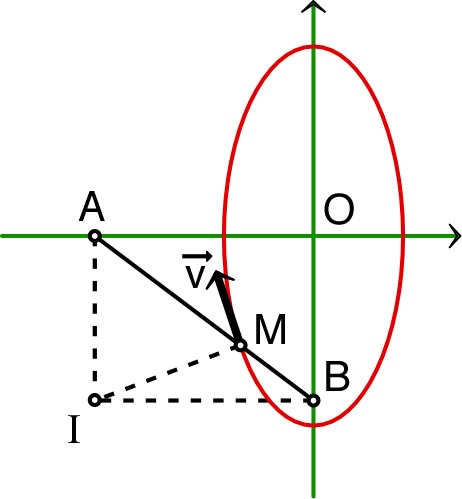 |
et .◊ remarque : avec (vecteur rotation perpendiculaire au plan) on peut écrire : ; cela découle du fait que tout déplacement peut être décomposé en une rotation autour d’un axe instantané de rotation et une translation parallèle à cet axe ; or ici la translation est nulle puisque le mouvement reste dans le plan, or est le centre instantané de rotation (intersection de l’axe orthogonal au plan avec celui ci) ; en effet : une rotation qui donne à un mouvement parallèle à a forcément son centre instantané sur la perpendiculaire en à (rayon perpendiculaire à la tangente) ; de même pour , d’où la position de ; on retrouve alors que est perpendiculaire au rayon (instantané) .