On constate alors que :
; .
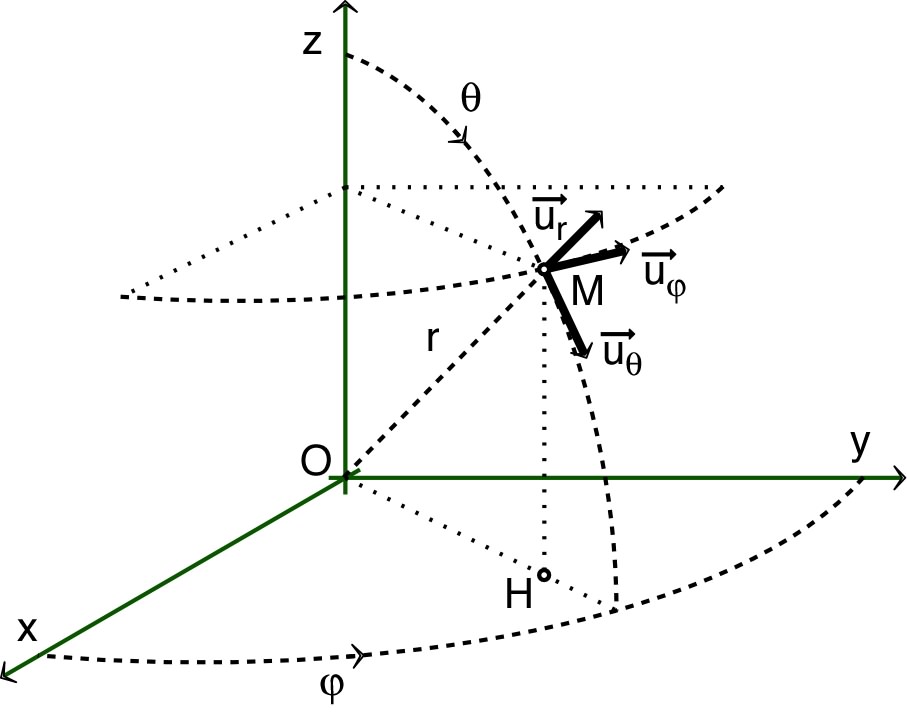
◊ remarque : contrairement aux coordonnées sphériques, ici le vecteur est selon .
;
.
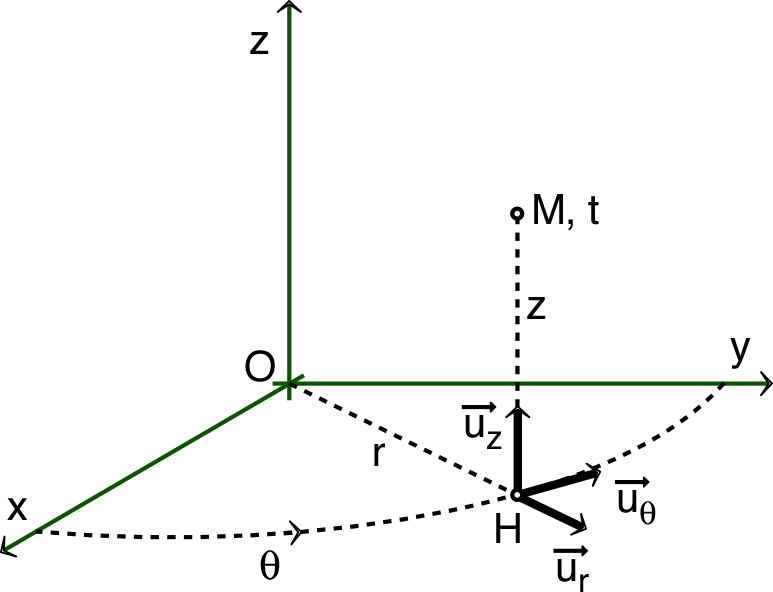
| Ces vecteurs unitaires sont définis de
façon “standard” : selon la direction et le sens des
déplacements de
résultant des augmentations respectives de
,
et . On constate alors que : ; . ◊ remarque : contrairement aux coordonnées sphériques, ici le vecteur est selon . |
|
;
;
.
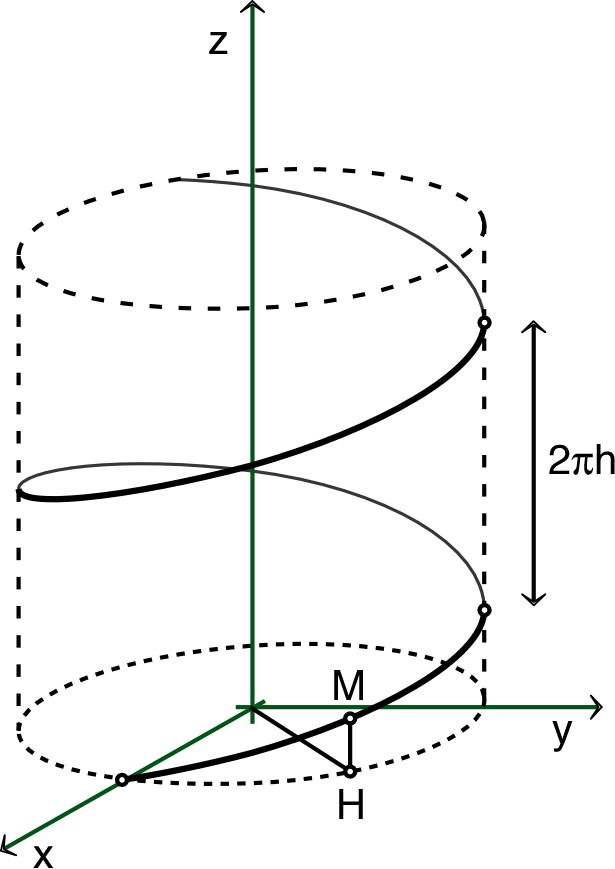
• On considère le mouvement hélicoïdal
d’un point sur
un cylindre de rayon :avec et (le “pas” de l'hélice est ). D’après la symétrie, le plus simple est d’utiliser des coordonnées cylindriques. • La vitesse est alors : ; D’une façon analogue : . |
 |
;
;
.
et (semblable aux coordonnées polaires) ;
et
(seules les projections sur dépendent de ) ;.
et .