| 3.a. |
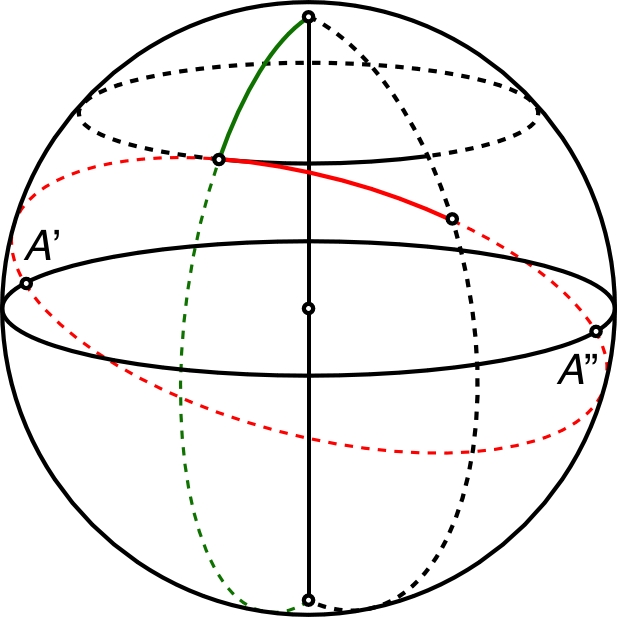
• Au lieu de terminer le trajet selon les
deux côtés du “pseudo-carré” précédemment commencé, on peut
imaginer que le pôle était le milieu d'un trajet analogue
dont on considère alors la première moitié. Le second côté
d'un tel trajet est un quart du méridien correspondant
à
et le départ est symétrique de l'arrivée (point
précédemment calculé) par rapport à
.
• La distance infinitésimale associée à un déplacement
élémentaire
peut s'écrire : , mais cela
nécessite d'établir la relation
décrivant le grand cercle reliant le point à
son symétrique.
• Si l'arc de cercle n'est pas trop grand, on peut supposer
que le terme en
est négligeable (il intervient dans une correction du second
ordre) et proposer l'approximation correspondant à l'arc de
parallèle :
; ceci est nettement inférieur aux distances
considérées, de l'ordre de
à
, mais ce n'est pas vraiment négligeable.
• Pour tester simplement l'ordre de grandeur, on peut alors
chercher la distance (en ligne droite) entre le point et
son symétrique :
;
;
;
;
ce résultat très peu différent confirme que la courbure
n'intervient qu'au second ordre.
• On peut enfin calculer la longueur de l'arc de grand
cercle sous-tendu par une telle corde :
; ainsi l'arc de parallèle était une très bonne
estimation.
|
| 3.b. |
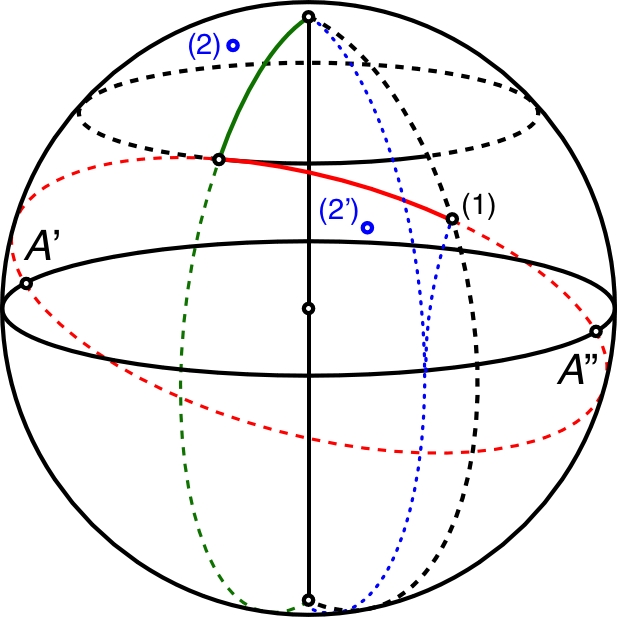
• D'après la symétrie précédente,
avec un point
tel que
, on peut conclure que l'autre moitié du
trajet est telle que le quatrième côté recoupe le
premier côté : en prenant le pôle au milieu du
trajet, on obtient l'autre extrémité à
donc “avant” l'axe de symétrie de l'ensemble.
• En partant du pôle, on peut donc conclure que la
seconde moitié du trajet aboutit du côté opposé à la
fenêtre de la base : à gauche de la porte ; un peu à
l'ouest pour un observateur situé un peu au sud.
• La direction du point d'arrivée n'étant pas très
éloignée de la perpendiculaire au méridien
selon
(il faudrait considérer la perpendiculaire au grand
cercle passant par le point
et par le point d'intersection des premier et
quatrième côtés), l'ordre de grandeur est
donc
(décalage à gauche de la porte). |
|
|
• Si on souhaite approfondir, on peut (par exemple)
considérer que le trajet réel
est symétrique du trajet
par rapport au plan médiateur du segment
. Sachant que est
sur à
la distance , en
écrivant l'égalité des distances par rapport aux extrémités
du segment, on obtient l'équation du plan :
. Cela caractérise le fait que les points de ce plan
(passant par
) sont tels que
est perpendiculaire au vecteur
. En se ramenant à un vecteur unitaire
avec
on peut retrouver les coordonnées de
d'après celles de
selon :
;
;
.
• On obtient ainsi :
;
;
;
; l'approximation ci-dessus était grossière mais
acceptable.
|