Les vecteur unitaires sont désignés par le symbole avec en indice le nom de la coordonnée.
Ces vecteurs sont souvent représentés à côté du repère, pour ne pas encombrer les schémas.
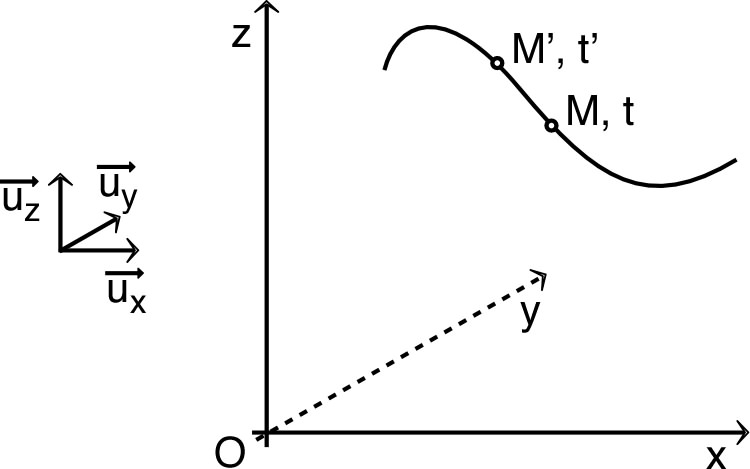
| • Les axes des repères cartésiens portent
l'indication du nom des coordonnées et du sens positif (ce
ne sont pas des vecteurs). Les vecteur unitaires sont désignés par le symbole avec en indice le nom de la coordonnée. Ces vecteurs sont souvent représentés à côté du repère, pour ne pas encombrer les schémas. |
|
.
.
;
; .
| • En coordonnées polaires, on repère par
la norme et la direction de
. On définit unitaire selon croissant et de même selon croissant : ; Ainsi : ; . |
 |
;
.
(dans la mesure où ) ;
et de même, si : .