| 1. |
• Avec les notations isotropes, la métrique
(limitée à la partie radiale) s'écrit :
|
;
;
;
; . |
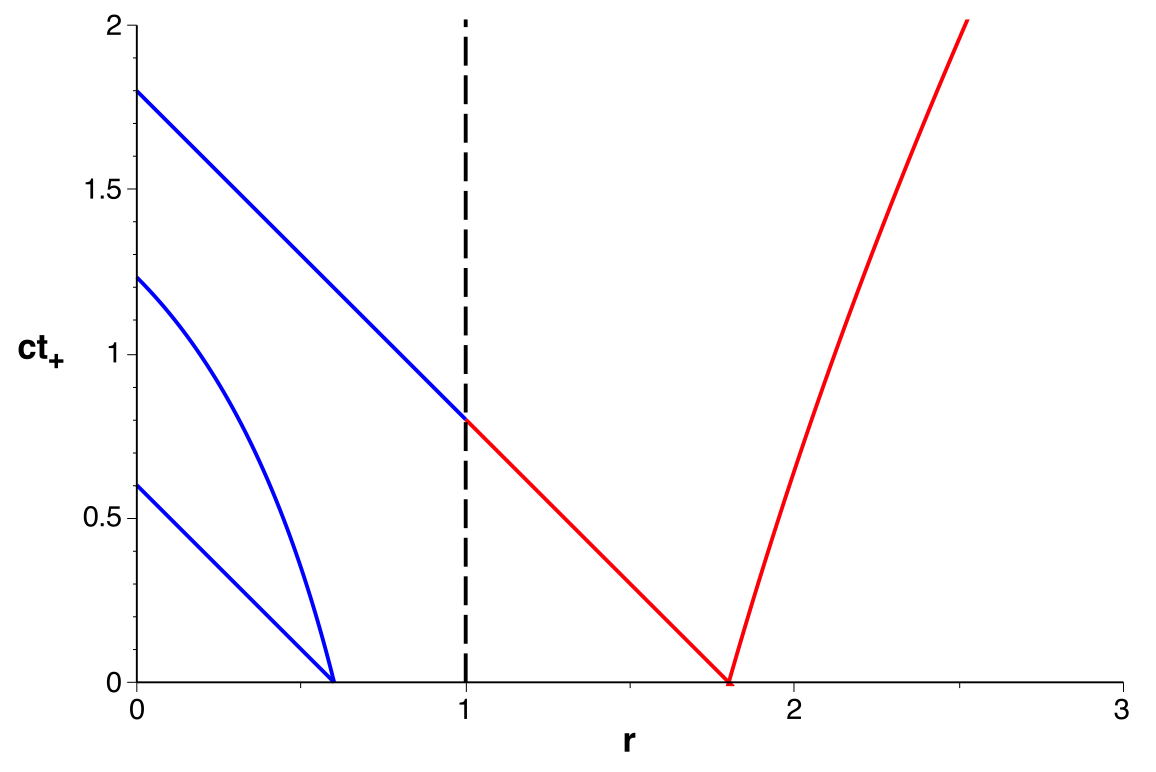
• Pour la chute libre verticale étudiée, la vitesse est
:
.
◊ remarque : on vérifie que
passe par un maximum pour
.
• La transformation de Lorentz correspondante peut s'écrire
:
|
;
;
;
(algébrique). |
• Ceci donne :
;
.
• Pour construire une transformation de Lemaître généralisée
adaptée à ces coordonnées, on est conduit à proposer
:
;
;
.
• On en déduit inversement :
|
; . |
• En substituant, ceci donne une métrique sans singularité
:
.
• On obtient alors :
.
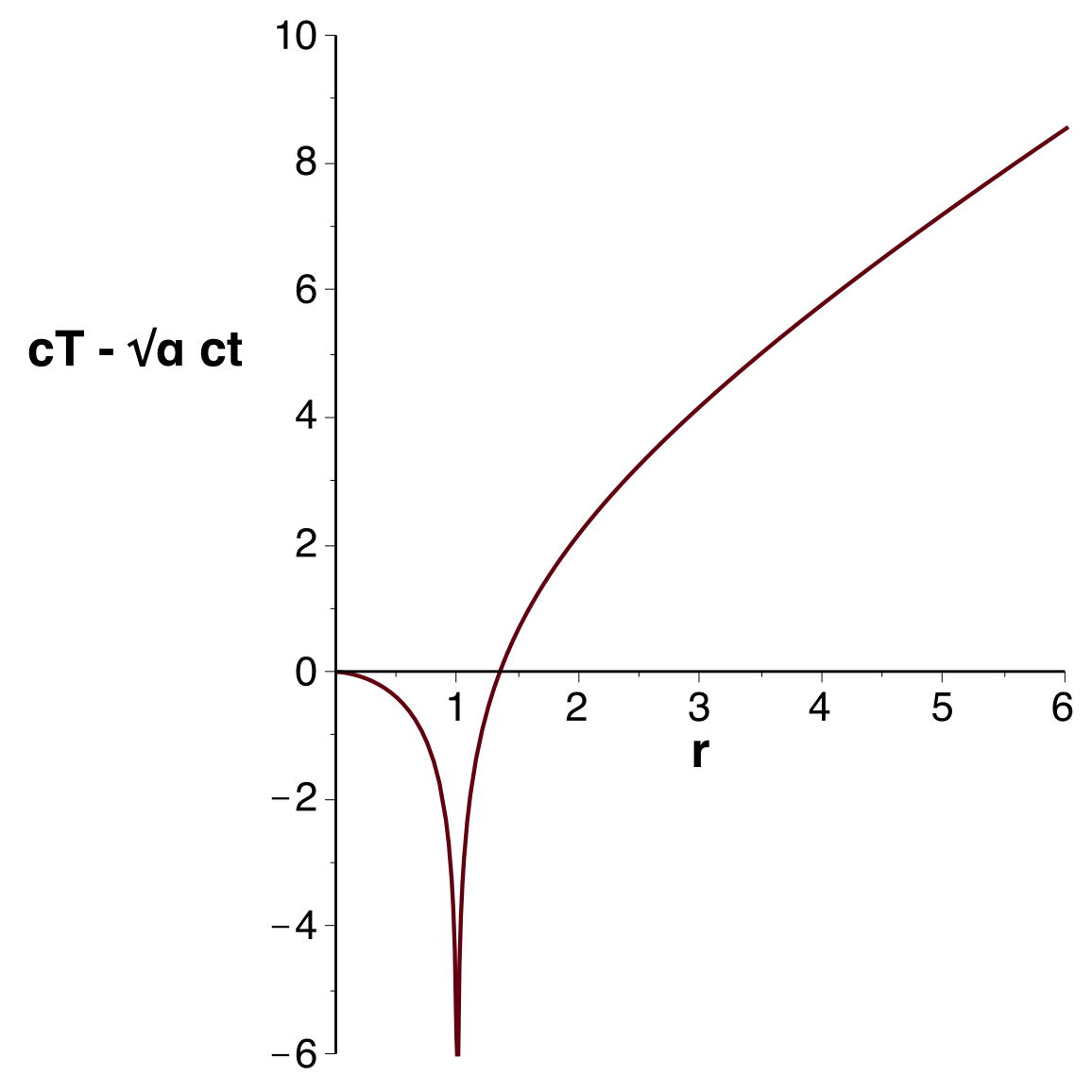
• Pour
(avec
comme unité), en passant par
l'intégration donne :
|
;
;
; minimum pour
. |
• Pour
(avec
comme unité), l'intégration donne de même :
|
; maximum pour
. |
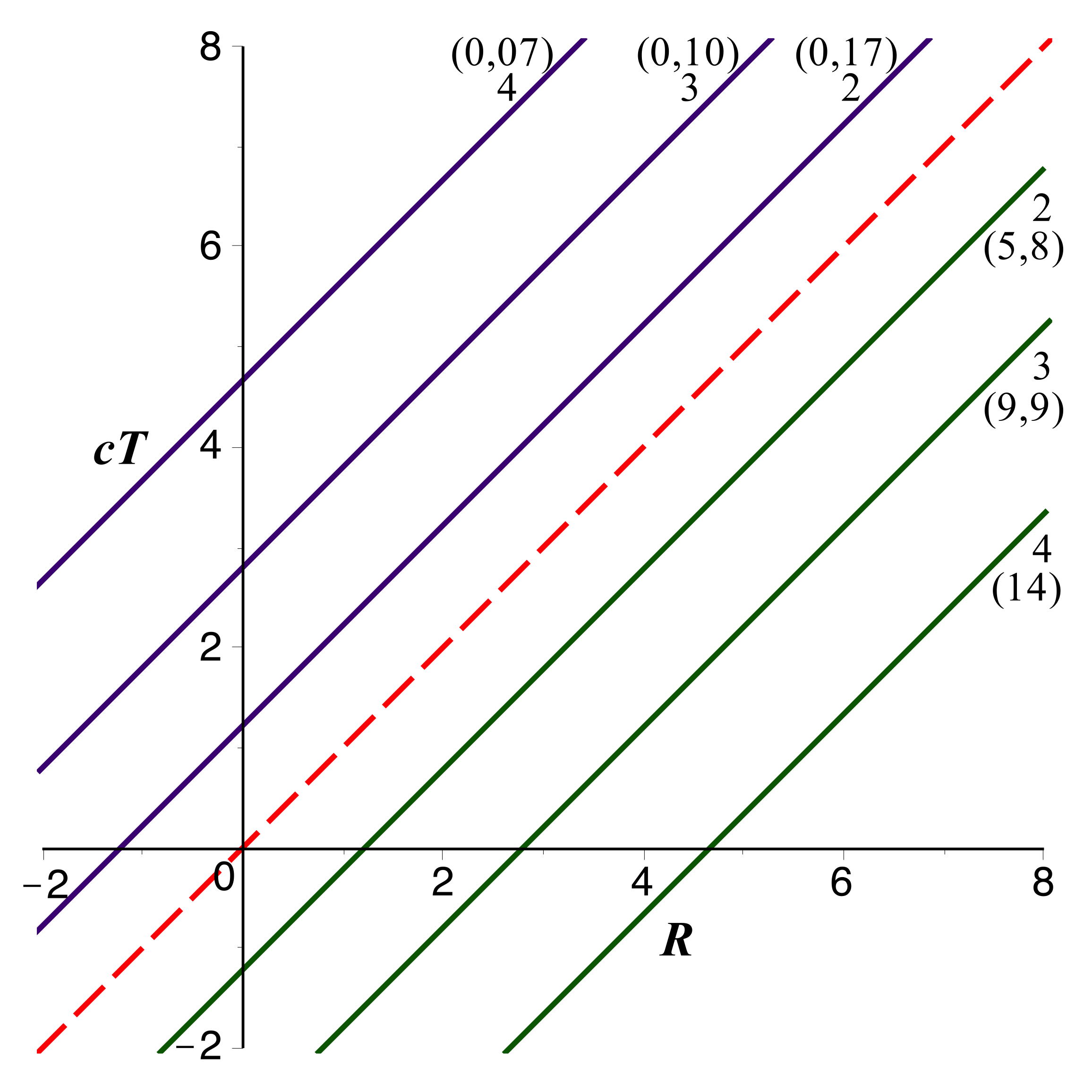
• Le raccordement pour
donne finalement :
|
. |
• Avec une échelle horizontale logarithmique (mieux adaptée
aux coordonnées isotropes), on obtient la représentation
suivante (avec
comme unité).
◊ remarque : c'est qualitativement ce qu'on obtient avec la
coordonnée
“classique” en raccordant les zones
en contraction puis en expansion (de l'autre côté de
l'horizon), après élimination des zones
; le raccordement est sans problème car ici
et
ne changent pas de signe.
• On obtient par ailleurs : .
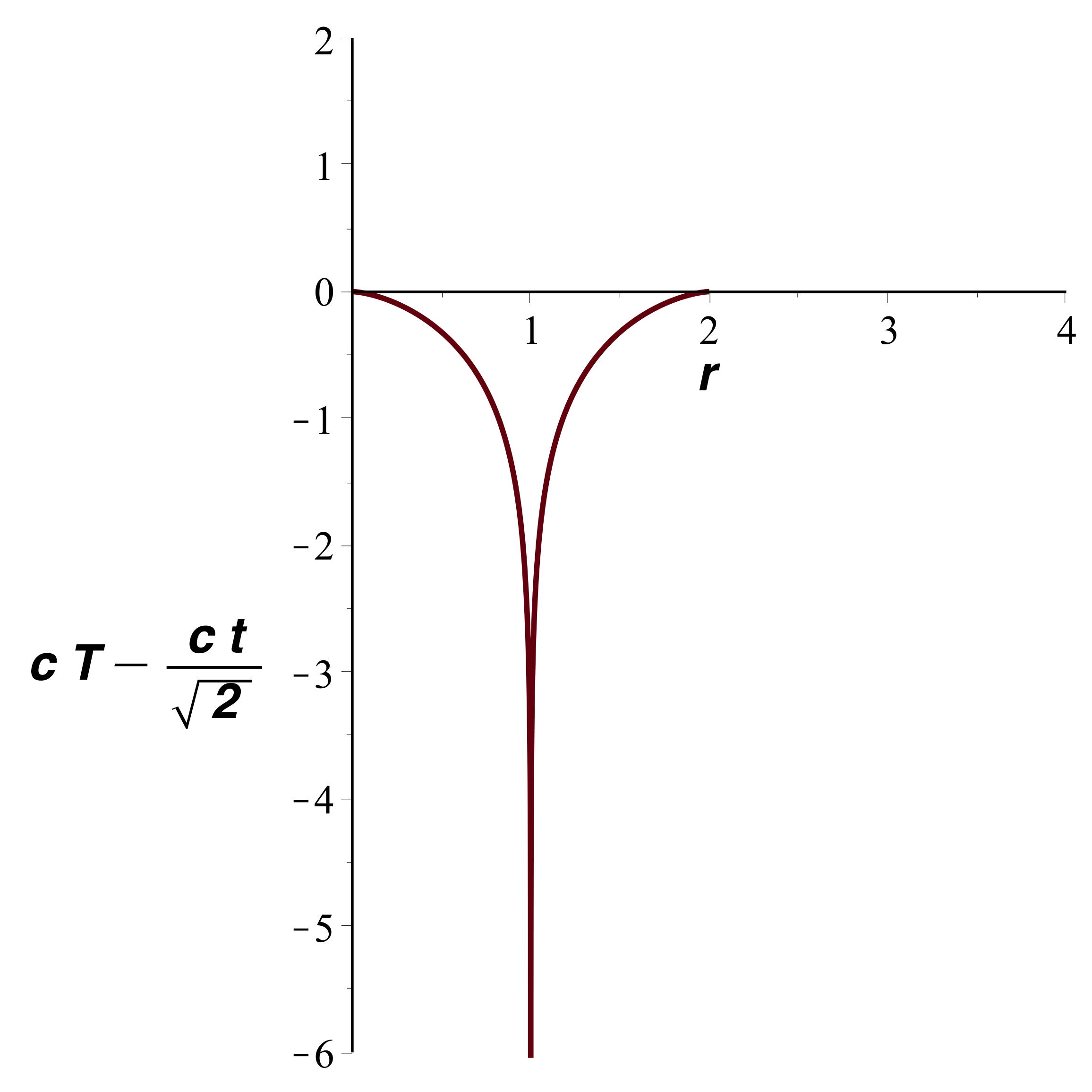
• Pour
(avec
comme unité), en passant par
l'intégration donne :
|
;
;
. |
• Pour
(avec
comme unité), l'intégration donne de même :
|
. |
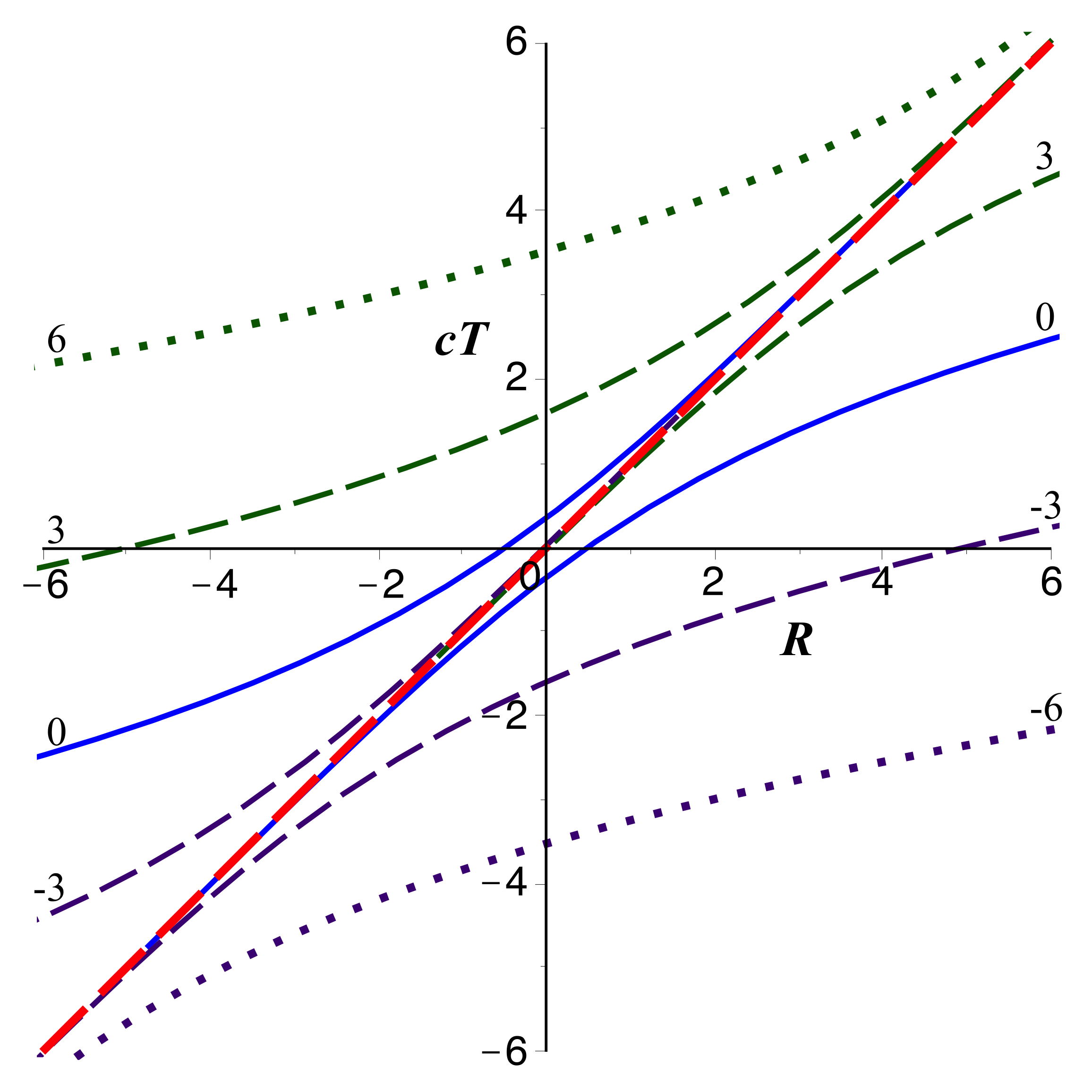
• Le raccordement pour
donne finalement :
|
. |
◊ remarque : ici a priori, il n'y a pas de composante
imaginaire pour
car on intègre
; il n'y en a alors ni pour
ni pour .
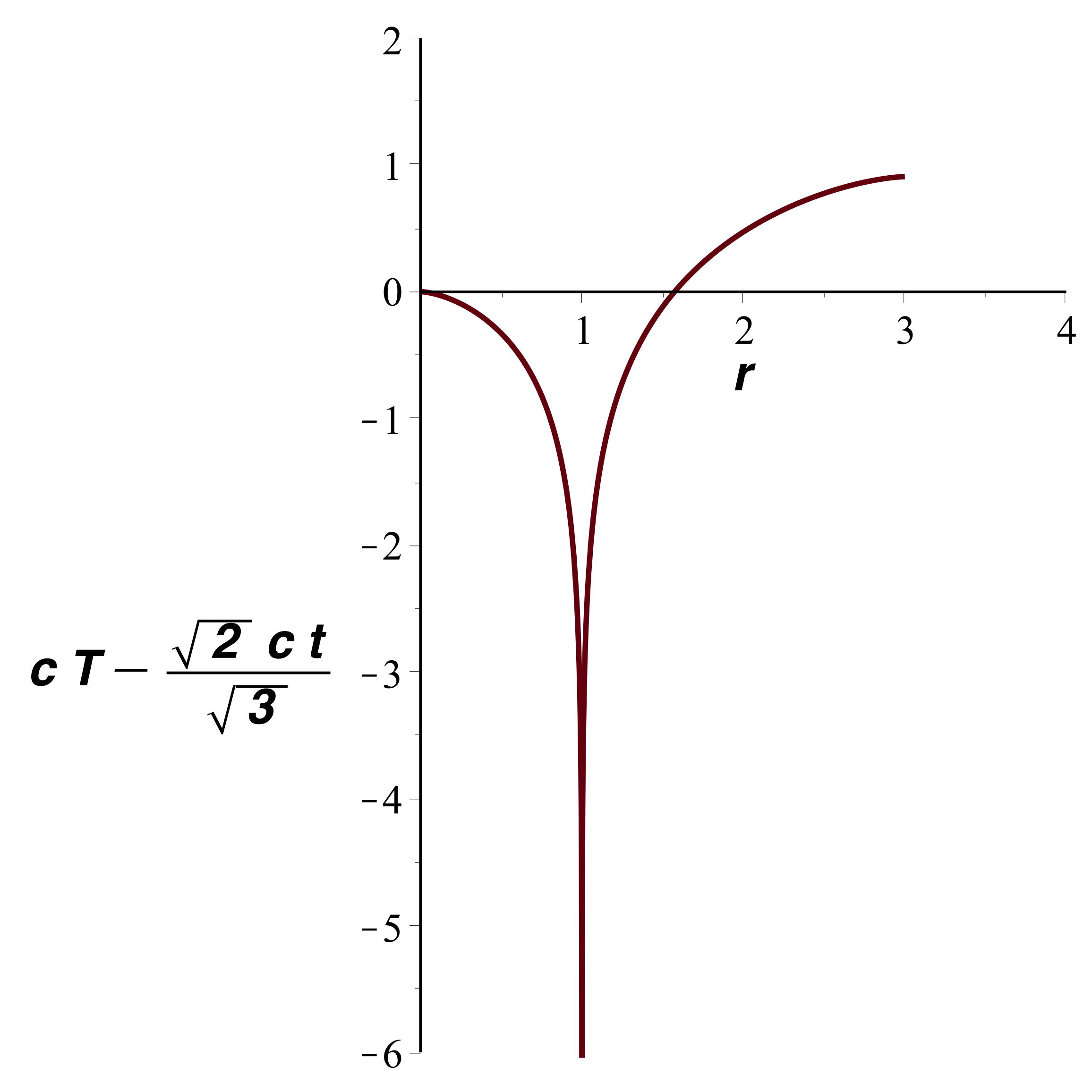
• Avec une échelle horizontale logarithmique (mieux adaptée
aux coordonnées isotropes), on obtient la représentation
ci-après (avec
comme unité).
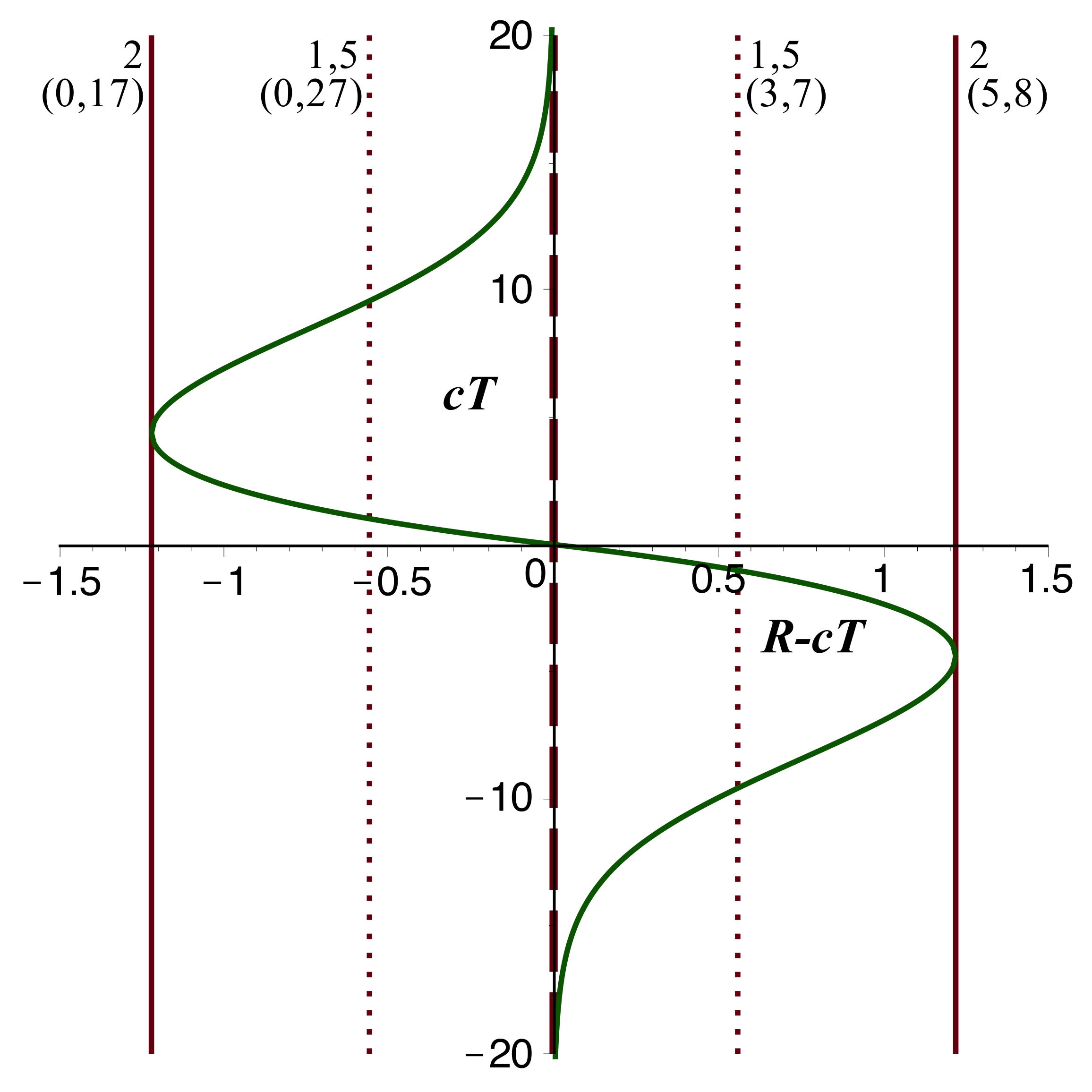
◊ remarque : ici la convention de signe pour
dans la région
est conforme à
, dans la mesure où l'équation du
mouvement
indique que
reste croissant.
|