.• On peut penser que cela correspond à la longueur spatiale. Toutefois, pour une métrique non diagonale, la notion locale de distance est décrite par avec un tenseur métrique tridimensionnel (cette métrique spatiale est l'inverse de la partie spatiale ).
• On obtient ainsi : ; cela ne change rien dans les deux questions suivantes puisqu'on se ramène au cas .
• En géométrie euclidienne dans le plan on peut considérer une ellipse centrée à l'origine, avec un demi-grand-axe selon et un demi-petit-axe selon . En considérant : et l'équation de l'ellipse peut s'écrire : . La métrique correspondante est alors : .
◊ remarque : pour l'ellipse en géométrie euclidienne, varie en même temps que ; pour pouvoir comparer, il faut pour trouver une écriture de la métrique en fonction de seulement.
• Lorsqu'on obtient une métrique en résolvant les équations d'Einstein, le fait que les coordonnées ressemblent à celles utilisées dans un espace plat ne signifie pas que leur interprétation doit être la même. La coordonnée de la métrique de Kerr ne représente pas une “distance radiale” à l'origine comme en géométrie euclidienne ; il en découle que les surfaces déterminées par ne correspondent pas à des sphères au sens usuel.
• Pour comparer avec un ellipsoïde (pour lequel dépend de ) on peut utiliser , ou bien pour simplifier. Le périmètre correspond à avec , donc : .
• Pour la métrique de Kerr avec , on peut étudier le périmètre en fonction de .
• En considérant pour comparer, on peut écrire : .
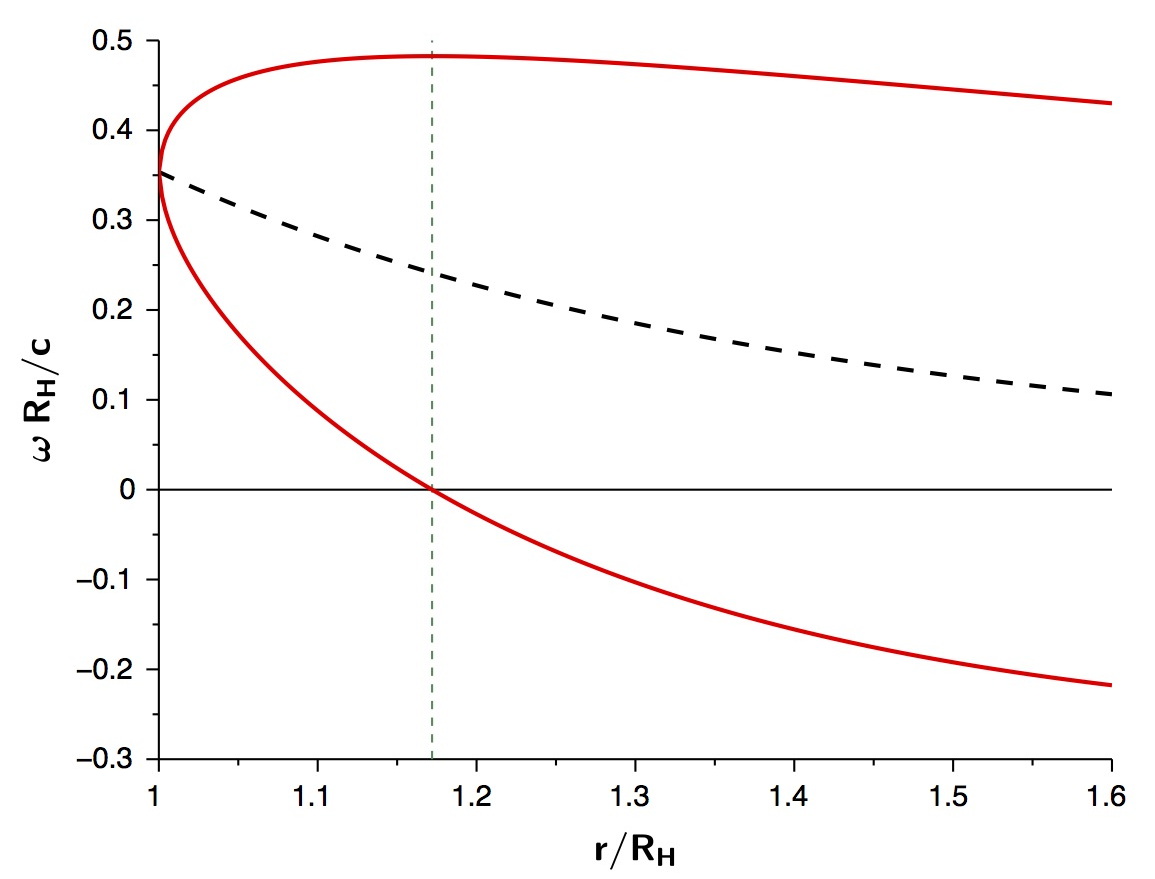
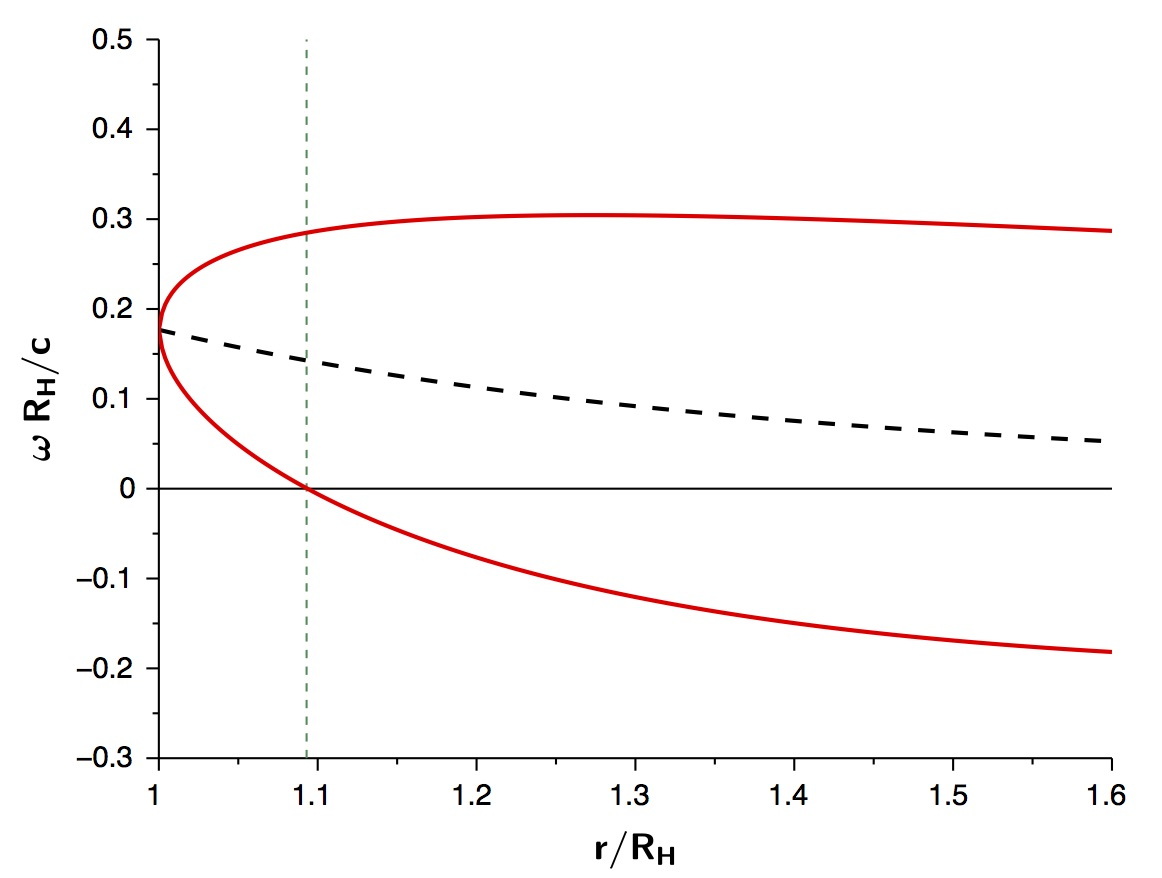
• La condition donne , d'où le périmètre nul noté précédemment, mais la condition n'est en fait pas suffisante. Pour que le périmètre soit défini, il faut que le dénominateur (issu de ) soit défini pour tout . En particulier pour il faut donc . Cette contrainte supplémentaire est liée au fait qu'en deçà il ne peut exister aucun observateur (ni “périmètre”) immobile ; il y a un effet d'entrainement par la rotation de l'espace (voir l'étude de l'ergosphère).
• L'expression n'étant pas simple, on peut en préciser numériquement le comportement à l'aide d'un cas particulier, par exemple pour (l'expression de nécessite ) . Ceci donne :
; ; ;• Pour simplifier l'étude, on peut choisir comme unité de longueur ; ceci donne :
.
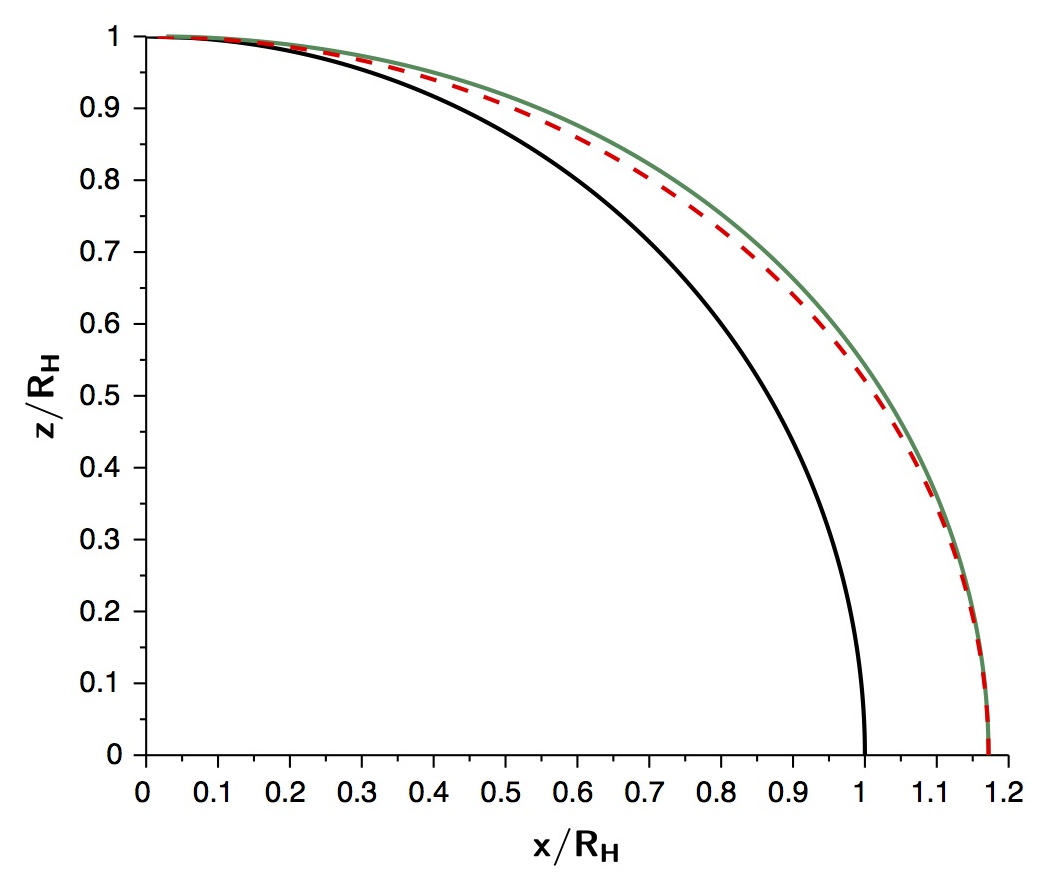
; ; ;◊ remarque : l'ellipticité est faible dès qu'on s'éloigne de l'horizon.
; .
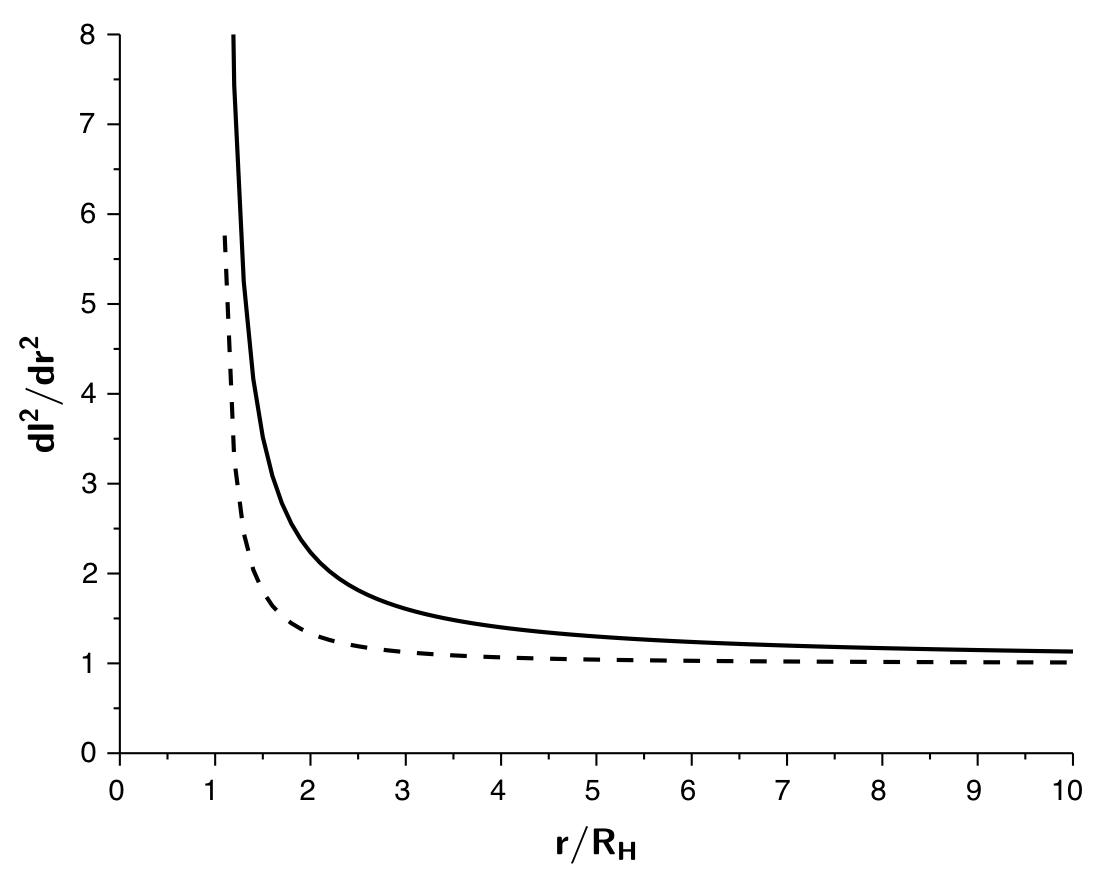
• On peut alors tracer (avec q en pointillé) :
et .• On constate alors que la métrique à la surface d'une ellipse n'est pas totalement représentative de la métrique de Kerr pour .
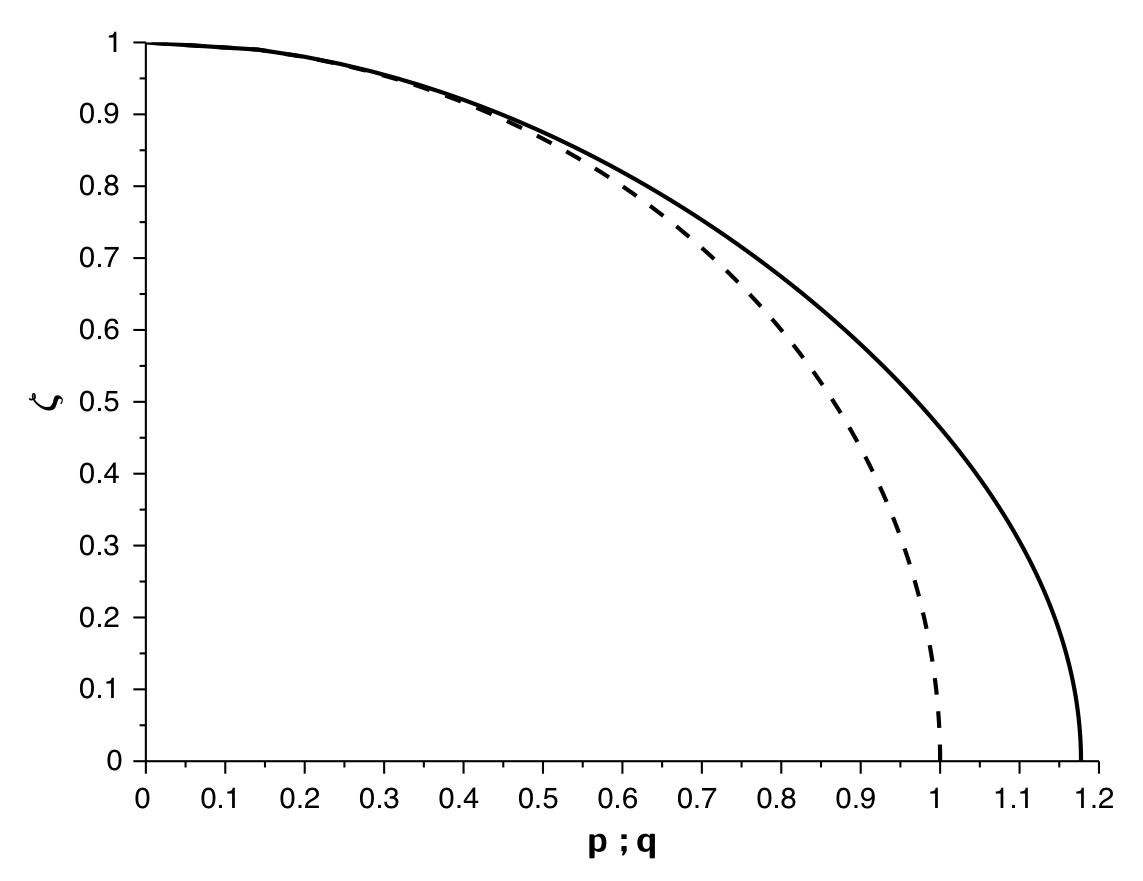
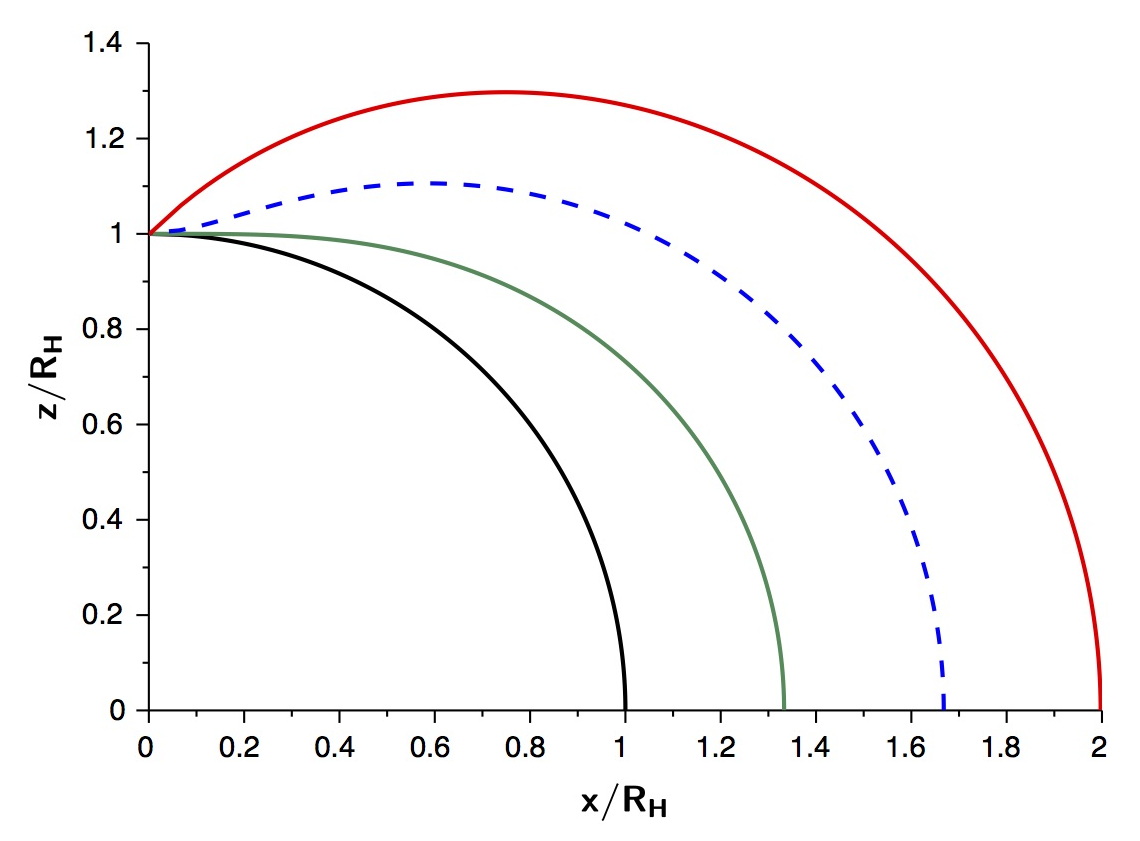
◊ remarque : contrairement à ce que pourrait suggérer le cas , on constate qu'au voisinage de l'équateur (et non vers zéro) quand ; ceci est lié au fait que n'est pas défini pour (de ce fait, sa signification pour est forcément douteuse).
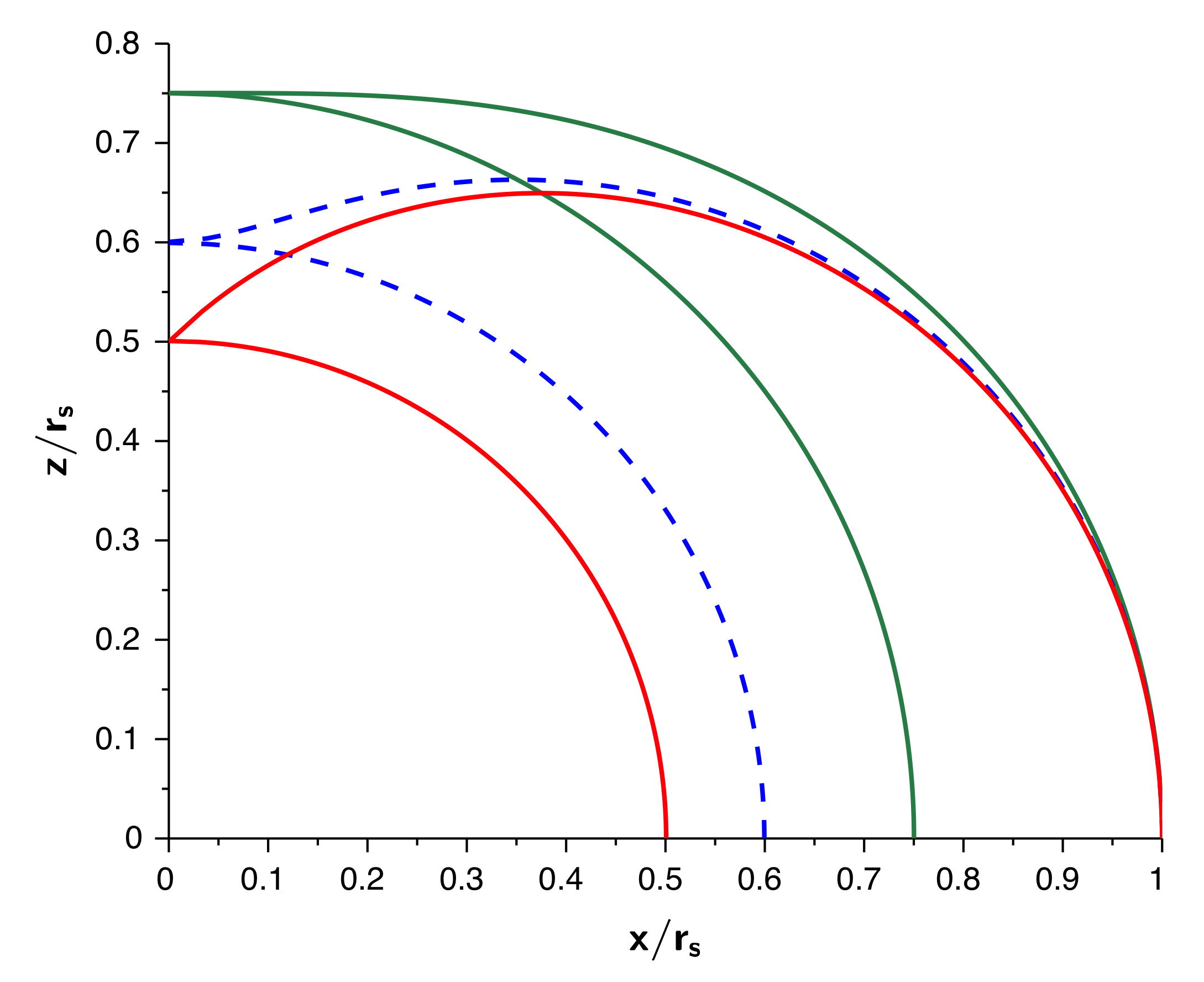
.• Pour que cela soit représentatif de la métrique de Kerr avec , il faudrait :
;• La comparaison impose : . Or ceci est impossible pour réel avec . Non seulement l'ellipsoïde n'est pas complètement représentatif, mais il n'existe pas de surface qui le soit.
.